


ТЕКСТ РАБОТЫ. В своей работе я представил электромеханический конструктор LegoMindstormEV3, а именно простоту его использования и доступность овладения процессом программирования людьми, не связанными в своей профессиональной деятельности с процессом программирования. Описав историю программирования, а так же сам электромеханический конструктор и его составляющие, программу соревнований для роботов из данного конструктора, я составил и провел опросник среди сотрудников одного из дошкольных учреждений нашего города для потверждения своей гипотезы о том, что блочная система программирования, применимая в данном виде электромеханического конструктора проста для создания программ, легка для понимания схем готовых программ людьми, не связанными в своей профессиорнальной деятельности с процессом программирования.

Нейро - компьютерные интерфейсы это относительно молодое направление, которое начало активно развиваться в девяностых годах прошлого столетия. Несмотря на то, что прошло совсем немного времени в нашем мире уже имеются некоторые феноменальные достижения. Например, антропоморфные манипуляторы - протезы, построенные на принципе нейро управления. Первая глава данной работы посвящена анкетированию школьников старших классов. В итоге этого анкетирования выяснилось, что учащиеся старших классов не знают что такое нейро интерфейс и методы нейро управления. Кроме того, опрошенные считают, что управление какими либо объектами, работа с приложениями и др. невозможно по средством "силы мысли". Вторая глава работы посвящена краткому историческому обзору создания нейро компьютерных интерфейсов и принципам работы нейрогаджета. Первая электроэнцефалограмма была снята всего лишь менее 100 лет назад. Для науки это небольшой срок, с тех пор неврологи всего мира стали изучать всевозможные частоты мозговой активности. Нейрогарнитура отслеживает состояние мозга и даёт пользователю возможность следить за своей активностью и повышать способность к концентрации внимания (5). В третьей главе работы рассматривается непосредственно процесс создания и описание строения собственного нейро компьютерного интерфейса типа "мозг - компьютер". Преимущества нашего исследования состояли в том, что был создан бюджетный вариант, более доступный по стоимости в сравнении с аналогами. В четвертой главе рассматриваются основные результаты собственного исследования активности различных биоритмов у взрослых и школьников. Приводятся также таблицы с итоговыми результатами проделанной работы.
В пятой главе мы подводим итоги и формулируем главные выводы нашей проектной работы. Цель была достигнута: мы создали свой собственный нейрогаджет типа "мозг-компьютер", исследовали различные биоритмы у взрослых и школьников разного возраста. Обе гипотезы (теоретической и практической части) подтвердились. Задачи проекта также были реализованы в полном объеме. Новизна результатов заключается в том, что в данной работе самостоятельно изучены и систематизированы данные некоторых биоритмов у учащихся МОУ гимназии г. Фрязино, а также у взрослых людей. Помимо этого, учащиеся осознали важность и структуру нейро - управления и нейро - компьютерных интерфейсов. В дальнейшем планируется на базе этого проекта реализовать нейро интерфейс, способный управлять определенными объектами, так как нейро управление способствует улучшению концентрации внимания.

ТЕЗИСЫ к работе «Датчик цвета для роботов»
Работу выполнила: Жернова Владислава Александровна
Симферопольский филиал МАН «Искатель»
Учащаяся МБОУ «СОШ№24» г. Симферополя
Научный руководитель: Улыбин Анатолий Борисович.
Задача работы: Самостоятельно изготовить механические и электронные узлы цветового датчика. Разработать программу для микроконтроллера, обеспечивающую выполнение заданной функции, методику распознавания цветов и их оттенков. Сделать автономный датчик цвета для применения в самодельных робототехнических устройствах.
Цель работы: Провести поиск известных технических решений и принципов работы покупных датчиков цвета. Провести исследования спектрального состава отраженного света и разработать свой метод определения цвета. Ознакомиться с этапами проектирования электронных устройств: разработка технического задания, разработка электрических схем микроконтроллерных устройств, проектирование и изготовление печатных плат, электромонтаж электронных узлов, разработка и отладка программного обеспечения. Изготовление опытного образца автономного датчика цвета.
Актуальность темы: В отличие от организаций, использующих в своей работе покупные конструкторы, из которых собираются роботы, существует много кружков технического творчества, да и просто любителей, собирающих робототехнические устройства своими руками из подручных материалов. Для этого круга любителей актуальной является задача изготовления такого датчика своей конструкции. Существует много предложений различных фирм по продаже готовых датчиков, например фирмы Ардуино или Лего. Но всегда существует проблема, как приспособить купленный датчик к своему устройству, как его настроить и запрограммировать. И самое главное: для самодеятельных конструкторов интересна сама работа - узнать принципы работы таких датчиков, провести исследования, сконструировать и изготовить устройство. Поэтому было решено провести исследования, которые помогут создать самодельный датчик для робота, позволяющий определить цвет предмета и разработать опытный образец такого датчика.
Вывод: В ходе выполнения работы мы ознакомились с физикой света, спектральными характеристиками источников и приемников света, выяснили, что такое цвет предметов и от чего он зависит. Проведен поиск известных технических решений, лежащих в основе цветоопределения, выработана методика исследований, изготовлена экспериментальная установка для проведения исследований. Проведены исследования, по результатам которых выработаны требования к датчику цвета. Изготовлен опытный образец датчика.
Список использованной литературы:
Устройство, которое блокирует замок зажигания в траннспортном средстве если все ремни безопасности не пристёгнуты.

Система состоит из двух модулей: модуль голосового управления и исполнительное устройство. Система превращает голосовую команду в механическое воздействие на джойстик инвалидного кресла, таким образом, происходит контроль движения кресла, без существенных изменений конструкции.
"Автоматизированная портативная система прикрытия пехоты."
Балезин Олег Александрович
МАОУ "Лицей №102 г.Челябинска"
Научный руководитель: Пашнин Андрей Александрович, педагог дополнительного образования МАОУ лицея № 102 г. Челябинска
Цель работы: Разработка прототипа переносной автоматизированной системы прикрытия пехоты.
Описание научно-исследовательской работы: Система состоит из двух подсистем: турели и пульта ДУ.Турель вращается, благодаря сервоприводу. Система сканирует пространство. С помощью связки датчиков ультразвукового и инфракрасного, микроконтроллер фиксирует нахождение объекта и передает сигнал на сервопривод, спускающий курок. Чтобы активировать систему и задать ее режим работы используется пульт ДУ. Пульт отправляет данные по радиосвязи(используется радиомодуль). Режимы работы активируются с помощью нажатия определенных клавиш. При резком обрыве радиосвязи или установке противником устройств, создающих радиопомехи, активируется автоматический режим работы.
Актуальность, значимость и новизна исследования: Существующие автоматизированные турели имеют достаточно большой вес, в связи с чем, их транспортировка вручную может вызывать затруднения. Эти системы используют специально разработанные для них орудия, и в случае выхода их из строя, ремонт в условиях боевых действий может оказаться невозможен. Именно поэтому возникла необходимость создания портативной (переносной) автоматизированной системы прикрытия пехоты, в которой могут использоваться стандартное стрелковое оружие.
Итоги исследования:
Список литературы:
1. Большая книга экспериментов для школьников/под ред. А. Мейяни; пер.: Э.И. Мотылева. – М.: Росмэн-Пресс, 2007. – 260 с.
2. Улли Соммер – Программирование микроконтроллерных плат Arduino Freeduino 2012г.
3. Чарльз Платт -Электроника для начинающих «БХВ-Петербург» 2012 г.

Исследовательский проект: "Модульные зарядные устройства на основе монокристаллических и гибких тонкоплёночных (аморфных) преоразователей солнечной энергии"
Даянова Александра Борисовна
МБОУ "Лицей №11 г.Челябинска"
Научный руководитель: Красавин Эдуард Михайлович, учитель технологии высшей категории, МБОУ "Средняя общеобразовательная школа №2 г.Верхний Уфалей", руководитель Сетевого Представительства программы "Шаг в будущее"
Целью работы является разработать и создать, на основе промышленных тонкоплёночных солнечных преобразователей, универсальное зарядное устройство, способное обеспечивать энергией мобильные средства связи и обработки информации.
Описание научно-исследовательской работы:
В работе рассмотрен вариант создания модульного зарядного устройства на основе монокристаллических и гибких тонкоплёночных (аморфных) преобразователей солнечной энергии. Исследуются принцип работы солнечных батарей и методы улучшения выходных характеристик солнечных преобразователей. Проводится экспериментальная проверка выходных параметров солнечных модулей, на основе полученных результатов делаются выводы о значимости и актуальности такого устройства.
Актуальность, значимость и новизна исследования:
Фотоэлектрическими системы позволяют использовать солнечную энергию как альтернативу ископаемому топливу. Проблемы с другими источниками энергии стимулируют развитие фотоэнергетики. С каждым годом доля применения этой области увеличивается, появляются более усовершенствованные солнечные модули. В свою очередь, такие батареи необходимо уметь внедрять в различные технические сферы для установления постоянного источника энергии. Данное исследование основано на применении новейшей тонкоплёночной технологии для создания универсального зарядного устройства на основе преобразования солнечной энергии, позволяющего успешно использовать этот вид энергии для зарядки аккумуляторной батареи мобильных устройств. Преимуществом данной компактной, лёгкой и надёжной станции является возможность применять её в условиях, когда другие источники энергии недоступны. Для улучшения выходных характеристик модулей также использованы повышающий DC-DC преобразователь и стабилизатор серии 78L.
Итоги исследования:
Доказана возможность применения современных тонкоплёночных модулей из аморфного кремния для создания экологичных зарядных станций для мобильных устройств на основе преобразования солнечной энергии. Разработанный, на основе проведённых исследований, экземпляр зарядной станции обеспечивает удовлетворительные выходные характеристики, позволяющие с успехом применять её для обеспеченя энергией мобильной техники в различных условиях.
Список литературы:
1. Д.Джанколи, Физика: В 2-х т. Т. 1, М., Мир, 1989.
2. В.М.Андреев, В.А.Грилихес, В.Д.Румянцев, Фотоэлектрическое преобразование концентрированного солнечного излучения. - Л.: Наука, 1989.
3. http://www.uniis.kiev.ua/sunbat/ - Тонкоплёночные технологии.

Название научно-исследовательской работы – Разработка и изготовление устройства для сканирования окружающего пространства в оптическом и инфракрасном диапазонах
ФИО автора(ов) работы – Булгаков Сергей Валерьевич
Образовательное учреждение, в котором обучается автор(ы) работы – ГБОУ Лицей №1557
ФИО, должность и место работы научного руководителя – Татарников Андрей Михайлович, Старший научный сотрудник Государственного астрономического института им. П.К. Штернберга МГУ
Актуальность исследования – Когда я проходил практику в Кавказской горной обсерватории (готовился к международным олимпиадам по астрономии), выяснилось, что обычно при частичной облачности научные наблюдения не проводятся. Однако, современные ИК-телескопы с быстрым наведением и регистрацией позволяют отнаблюдать интересующий объект буквально за несколько минут.
Краткая постановка цели(ей) и задач исследования – Соответственно родилась идея о создании сканирующего устройства (далее буду называть такое устройство приводом), позволяющего оптимизировать работу обсерватории путем выявления областей неба, не занятых облаками и пригодных для проведения наблюдений.
Значимость и новизна исследования – На данный момент подобного устройства в ведущих российских обсерваториях нет. В Крымской астрофизической обсерватории время наблюдения одного объекта велико, что сводит на нет наблюдения в условиях облачности. В Кавказской горной обсерватории телескоп может наводиться и снимать необходимые данные относительно быстро, ведутся работы по разработке сканирующего устройства, но они еще не завершены. Возможными конкурентами могут быть зарубежные сканирующие установки, а также устройства на базе матриц, позволяющие быстрее получить результат (картинку), но имеющие гораздо более высокую стоимость. Установка имеет пользу не только для обсерваторий, оно может быть использовано для научных наблюдений распределения яркости свечения сумеречного неба в оптическом диапазоне с целью изучения пространственного содержания пыли и аэрозолей в атмосфере. Возможно использование устройства и для других целей, например, для сканирования фасадов зданий, трубопроводов и других объектов в инфракрасном диапазоне при поиске утечек тепла.
Основной текст тезисов. Включает в себя краткое, структурированное описание научно-исследовательской работы. В тексте тезисов может быть описаны методы проведения исследований, основные формулы, коды вычислительных программ, алгоритмы программных кодов, описание установки – В качестве оптического датчика используется фотодиод ФД-256 (Россия), сигнал от которого усиливается самодельным усилителем на базе двух операционных усилителей AD8541 (США), один из которых размещен непосредственно на подвижной части установки. В качестве измерителя температуры объекта был выбран цифровой ИК датчик MLX90614- DCI производства фирмы Melexis (Бельгия). Каркас привода изготовлен из стали и текстолита с использованием токарного и сверлильного станков. Для движения платформы с датчиками по двум осям (азимут и высота) используются шаговый двигатель ПБМГ-200-265 (Россия) и сервопривод S3315D Robot Servo фирмы HJ (Китай). В качестве управляющей аппаратной платформы был выбран микроконтроллер Arduino Nano (Китай), который позволяет использовать до 8 аналоговых датчиков одновременно. Данный микроконтроллер используется для: управления приводом; управления датчиками; первичной обработки данных от датчика (устранение наводок и шумов путем усреднения нескольких измерений в каждой точке сканируемого участка); передачи обработанных данных между установкой и ПК. Соответствующее программное обеспечение было разработано мной самостоятельно в среде IDE Arduino. Пользовательский интерфейс для управления процессом сканирования (передача параметров сканирования, запуск сканирования и т.д.) и визуализации в реальном времени полученных от привода данных был реализован на языке Java (версия 6) в среде программирования NetBeans IDE 8.1. В программе реализованы четыре способа сканирования выбранного сектора окружающего пространства: - с преобладанием движения по азимуту (2 различных метода); - с преобладанием движения по высоте (также 2 различных метода). Визуализация результатов измерения производится в прямоугольной проекции Меркатора. Установка и реализованное программное обеспечение были протестированы в лабораторных условиях. Были получены следующие параметры: - скорость перемещения датчиков 0.1 гр./мс; - разрешение оптического датчика 7 гр.; - точность позиционирования датчиков 1 гр.; - разрядность измерения аналоговым датчиком 10 бит. Время сканирования участка 90 гр. × 90 гр. с вышеуказанными параметрами ‒ примерно 33 сек. Произведена проверка ИК датчика: отсканирован горячий чайник, получен его силуэт. Было установлено, что по умолчанию датчик работает в относительно точном, но медленном режиме. Ведутся работы по изучению регистров датчика для настройки этих параметров. Тем не менее, при увеличении времени простоя привода на одной точке ИК датчик успевает среагировать на изменение, и программа выдает удовлетворительную картинку. Ожидаю хорошей погоды для тестирования ИК датчика на облачном с прояснениями небе. При лабораторном тестировании выяснилось, что измерительная часть оптического датчика чувствительна к внешним электрическим наводкам с частотой 50 Гц. Проблема частично устранена путем использования экранированного провода и усреднением данных. Установка и реализованное программное обеспечение были протестированы также и в полевых условиях (Кавказская горная обсерватория, Карачаево-Черкессия). Полученные карты освещенности неба были визуально сравнены с фотографиями неба, сделанными в момент работы установки. Полученные результаты в целом совпали с фотографиями.
Итоги исследования – В ходе работы были изучены возможные способы сканирования выбранного сектора окружающего пространства и выбраны целесообразные способы. Были исследованы доступные мне недорогие датчики, позволяющие собрать информацию об оптической яркости и температуре объекта. Был спроектирован, изготовлен и собран привод для сканирования окружающего пространства, который позволяет закрепить на себе подобранные раннее датчики. Также в ходе работы были изучены аппаратная платформа Arduino Nano и среды программирования IDE Arduino и NetBeans IDE. С помощью указанных средств были самостоятельно разработаны: 1. программа для управления приводом, позволяющая направлять датчики в требуемую точку сканируемого участка; 2. программа для управления датчиками и для передачи данных между датчиками и ПК; 3. программа для управления процессом сканирования и для визуализации полученных результатов. Установка и реализованное программное обеспечение показали работоспособность в полевых условиях. Таким образом, поставленная научная задача в целом решена успешно с использованием недорогих и доступных комплектующих. В данный момент происходит развитие проекта в плане увеличения эффективности работы установки: уменьшения времени сканирования и улучшение визуализации.
Список использованной литературы (при наличии) – Информация из Интернета была использована для изучения теории по: операционным усилителям; языкам программирования Processing, Arduino и Java; технологии Serial Port; микроконтроллерам Arduino; фотодиодам; ИК-датчикам Melexis. В основном информация бралась с сайтов: ru.wikipedia.org; processing.org; www.arduino.cc; docs.oracle.com/javase/6/docs/; www.melexis.com/en.
.
Разработка и создание роботизированной системы контроля и управления движением для людей с ограниченными возможностями по зрению «Робобайк»
Автор: Барсуков Егор Леонидович, г. Челябинск, МБОУ «Лицей № 11 г. Челябинска», класс 5, valentinka74@yandex.ru +7-963-462-02-40
Научный руководитель: Овсяницкая Лариса Юрьевна, кандидат технических наук, доцент кафедры математики и информатики Челябинского филиала Финансового университета при Правительстве Российской Федерации г. Челябинск.
Целью работы является разработка и создание прототипа роботизированной системы контроля и управления движением для людей с ограниченными возможностями по зрению на основе велосипеда.
Актуальность проекта обусловлена необходимостью оказания помощи людям с ограниченными возможностями по зрению в социальной адаптации, в особенности детям.
В ходе выполнения проекта проведен анализ аналогичных устройств, учтены их достоинства и недостатки. Особое внимание уделено конструкторским и инженерным идеям, а также нестандартному применению обычных вещей.
В создаваемой системе применены основные принципы робототехники, создан механизм управления на базе робототехнического конструктора Lego Mindstorms EV3 .
Проведено тестирование устройства в реальных условиях. В процессе создания опытного образца были созданы несколько различных конструкций, проведен их анализ, учтены недостатки. Работа была выполнена автором из доступных материалов с минимальным применением технически сложного оборудования.
Проект «Робобайк» был разделен на несколько этапов.
Этап первый – Исследования.
Этап второй – Разработка технического задания и изготовление опытного образца дополнительных колес к велосипеду.
Этап 3 – Робототехнический. Программирование и установка робототехнического комплекса на прототип.
Так как целью проекта является устройство для движения людей с ограниченными возможностями по зрению на велосипеде, то необходимо учитывать установленные мировые стандарты:
1. Движение должно осуществляться по велосипедным дорожкам.
2. Для людей с ограничением по зрению существует специальная разметка в виде желтых кругов или желтых полос. Желтый цвет выбран по тому, что для слабовидящих людей желтый цвет – последний цвет спектра, которые они могут видеть.
В работе использованы следующие компоненты конструктора и элементы крепления:
Ультразвуковой датчик – устанавливается на руле велосипеда. Контролирует наличие препятствий на расстоянии до 2,5 метров. Сигнал распространяется в виде конуса
Два датчика цвета – устанавливаются на металлических пластинах дополнительных колес с помощью элементов Лего и пластины из ПВХ.
Механизм обратной связи реализован с помощью электромоторов с вибрационными и звуковыми элементами (встроены в руль велосипеда под ручками), а также с помощью динамика, встроенного в блок EV3, и работает следующим образом: при наезде на запрограммированный цвет, например желтый или оранжевый, правым датчиком, из динамика раздается предупреждение: «Справа», начинает работать правый вибромотор. В правой ручке появляется локальная вибрация и раздается звук. Велосипедист должен повернуть направо и выровнять траекторию. В случае, если этого не происходит, через заранее запрограммированное время раздается команда «Стоп», и начинают работать оба вибромотора в руле велосипеда. Команда «Стоп» и вибрация в руле с двух сторон также появляется в случае, если датчик ультразвука обнаружил препятствие. Велосипедист должен остановиться.
Блок управления EV3 закреплен под сидением . Провода фиксируются к раме с помощью гибких нейлоновых стяжек.
Итогом проделанной работы стал опытный образец (прототип) роботизированной системы контроля и управление движением для людей с ограниченными возможностями по зрению – «Робобайк» . Система может быть использована в специализированных школах для детей с ограниченными возможностями по зрению, в качестве комплекса по реабилитации и адаптации.
Список используемой литературы и источников:
1. Овсяницкая, Л.Ю. Курс программирования робота EV3 в среде Lego Mindstorms EV3/ Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий. 2-е изд., перераб. и доп – М.: Издательство «Перо», 2016. – 300 с.
2. Овсяницкая, Л.Ю. Пропорциональное управление роботом Lego Mindstorms EV3 / Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий. – М.: Издательство «Перо», 2015. – 188 с.
3. Овсяницкая, Л.Ю. Алгоритмы и программы движения робота Lego Mindstorms EV3 по линии / Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий. – М.: Издательство «Перо», 2015. – 168 с.
4. интернет – ресурсы (более подробно в работе)
Приложение

рис. 1 Автор работы с готовым проектом

Исследовательский проект: "Система автоматического управления параметрами теплицы на основе микроконтроллера"
Ляховский Андрей Валерьевич
МБОУ "Лицей №11 г. Челябинска"
Научный руководитель: Пашнин Сергей Владимирович, старший преподаватель кафедры "Инновационно-измеритальная техника", Южно-уральский государственный университет. Чебанько Александр Николаевич, учитель физики высшей категории, МБОУ "Лицей №11 г. Челябинска"
Целью работы является проектирование и создание полезной модели автоматизированной теплицы с управлением параметрами освещения, температуры воздуха, влажности воздуха и почвы.
Описание научно-исследовательской работы:
В научной работе рассмотрен способ автоматического поддержания оптимального режима овощной продукции в условиях личного, подсобного хозяйства. Анализируются три основных параметра: влажность почвы, температура воздуха втеплице и уровень освещенности растений. Указанные параметры непрерывно измеряются соответсвующими датчиками, а анализирующее ситуацию устройство на основе микропроцессорного модуля Arduino Uno выдает соответствующие команды на исполнительные органы.
Актуальность, значимость и новизна исследования:
Автоматизированная система управления теплицей позволяет дачникам, установившим такую систему, гарантированно сохранить выращиваемые растения от пагубного влияния резких климатических изменений, в первыю очередь, заморозков. Кроме того автоматический полив дает возможность датчику не приезжать в указанный график полива, экономя тем самым его время. Этим не исчерпываются все возможности системы контроля. В ней также заложена способность удаленного контроля за многими параметрами с помощью модуля расширения LoRa (при ее наличии). Перспективна идея добавить датчики контроля территории садово-огородного участка с выводом информации на пульт охраны садового товарищества. Данная работа представленна в виде работоспособного макета теплицы и без принципиальных изменений может быть адаптирована к реальной теплице. Для обеспечения адаптации к реальным условиям был разработан блок питания на основе инвертора 220В/12В для галогенных ламп накаливания.
Итоги исследования:
Конструкция модели теплицы доведена до рабочего состояния, прошла апробацию в реальных условиях эксплуатации и показала высокую надежность и эффективность.
Список использованной литературы:
1.http://maxkit.ru/
2.Simon Monk. Programming Arduino. Getting started with sketches.-www.ebook777.com
3. Блум Джереми. Изучаем Arduino: инструменты и методы технического волшебства - СПб.:БХВ-Петербург, 2015
Цель исследования: проектирование и конструирование робота-помощника для передвижения слабовидящих детей в здании образовательного учреждения.
Объект исследования: робот, помогающий детям с ограниченными возможностями здоровья (зрение) в передвижении по зданию.
Предмет исследования: программно-аппаратное решение робота-помощника для передвижения детей с ограниченными возможностями здоровья (зрение).
Задачи исследования:
Практическая значимость проекта: использование созданного робота-помощника в реальных условиях Алтайской средней общеобразовательной школы №2 для передвижения учащихся с ограниченными возможностями здоровья (зрение).
С 2015 года в МБОУ Алтайская СОШ №2 реализуется проект «Доступная среда», одной из задач которого является повышение уровня доступности объектов и услуг в приоритетных сферах жизнедеятельности, в том числе и создание условий для получения образования людьми с ограниченными возможностями здоровья. В связи с этим создание различных автоматизированных технических устройств в помощь детям с ограниченными возможностями здоровья определяет актуальность и новизну настоящей работы.
При проведенном в школе анализе выяснилось, что количество детей с ограниченными возможностями здоровья по зрению за последние 4 года возросло на 5%, а в районе на 10% (Приложение 2, рис. 6-7). Поэтому обеспечение беспрепятственного доступа учащимся с ограниченными возможностями здоровья в области зрения к объектам и услугам получения основного и дополнительного образования в МБОУ Алтайская СОШ №2 является актуальной проблемой.
В ходе работы над проектом были получены следующие результаты:
Робот может:
В процессе выполнения работы была проанализирована литература по созданию и применению подобных устройств (роботов) и были изучены особенности и способы передвижения детей с ограниченными возможностями здоровья (зрение).
Спроектирована и создана модель робота-помощника, которая демонстрирует выполнение задач, поставленных в работе. (Приложение 4, рис. 9)
Обсуждение эксперимента
Замена колесной базы на гусеницы позволила совершать маневр поворота более точно и двигаться параллельно относительно стен.
Актуальность исследования. Применение квадрокоптера, оборудованного прибором по замеру уровня концентрации горючих газов в воздухе позволит сократить вероятность возникновения угрозы жизни и здоровья человека.
Новизна исследования: на основании изученных источников, можно сказать, что использование квадрокоптера для замера уровня загазованности окружающей среды в настоящее время в Алтайском районе Алтайского края не применяется.
Цель исследования: определение качества воздушной среды при помощи квадрокоптера, оборудованного датчиком обнаружения утечек углеводородных газов, датчиком температуры и влажности, ЖК-экраном, а также беспроводной web-камерой.
Задачи исследования:
Объект исследования: воздушная среда.
Предмет исследования: квадрокоптер с установленным на него прибором по замеру качества воздушной среды.
В данной исследовательской работе представлена модель квадрокоптера, оборудованная прибором по замеру качества воздушной среды. Прибор оборудован датчиком обнаружения утечек углеводородных газов, датчиком температуры и влажности, ЖК-экраном, а так же беспроводной web – камерой для удаленного управления квадрокоптером. (Смотри рис. 1-7 приложение 1)
Для работы прибора использована платформа ArduinoUNO, датчик газа MQ-9, датчик температуры и влажности DTH11, модуль беспроводной связи ESP-01 и ЖК-экран для визуального определения показаний прибора. Установлена беспроводная wi-fi камера. Для работоспособности прибора был написан программный код для платформы ArduinoUNO. (См., рис. 9-13 приложение 2). Результаты исследования представлены в таблице 1 (приложение 3).
Итоги исследования:
Выводы и практические рекомендации.
По результатам проведенного эксперимента можно дать следующие рекомендации:
Научно-исследовательская работа
«УМНАЯ ШКОЛА НА БАЗЕ МИКРОКОНТРОЛЛЕРА «ARDUINO UNO»
Автор работы: Шакирянов Чингиз Маратович
МБОУ гимназия им. И.Ш. Муксинова г. Янаул Республика Башкортостан, 8 «а» класс
Научный руководитель: учитель информатики МБОУ гимназии им. И.Ш. Муксинова г. Янаул Республика Башкортостан Саляхов Флюр Рависович.
Автономные системы, как и роботы могут вызывать беспокойство и неуверенность, особенно когда их использование в повседневной жизни становится возможным. Чтобы уменьшить уровень беспокойства, нам нужно слегка сместить фокус с тех вещей, которые делают роботы, на то, чем они являются. В некотором смысле они могут быть более надежными, чем люди. Под автономностью мы имеем в виду способность системы принимать собственные решения о том, что делать и когда делать. До сих пор большая часть примеров, например, роботы-пылесосы, автопилот самолета и другие мелочи, были просты и не особо автономны. Эти системы адаптируются к окружающей среде, автоматически отвечая на изменения в ней. Они запрограммированы адаптироваться к окружающей среде. Но когда мы перейдем к настоящим автономным системам, программное обеспечение будет играть гораздо большую роль. Нам больше не понадобится человек для изменения маршрута самолета или сворачивания автомобиля на обочину. Мы считаем, сколько раз человек лгал нам в прошлом, и записываем все его ошибки. Но мы не можем быть уверены наверняка, что этот человек еще раз обманет нас. Наши автономные системы, с другой стороны, контролируются программным обеспечением, поэтому если мы можем изолировать все решения программного обеспечения на высоком уровне - те, которые должен принимать человек, - мы сможем детально проанализировать работу этих программ. С человеческим мозгом такое не пройдет. В некоторых случаях мы можем доказать, что программное обеспечение никогда не примет плохое решение. Именно таким может быть к примеру универсальный контроллер, который можно запрограммировать под какую-нибудь задачу и превратить в законченное электронное устройство, как Arduino.
Arduino - это электронный конструктор и удобная платформа быстрой разработки электронных устройств для новичков и профессионалов. Платформа пользуется огромной популярностью во всем мире, благодаря удобству и простоте языка программирования, а также открытой архитектуре и программному коду. Устройство программируется через USB без использования программаторов.
Arduino позволяет компьютеру выйти за рамки виртуального мира в физический и взаимодействовать с ним. Устройства на базе Arduino могут получать информацию об окружающей среде посредством различных датчиков, а также могут управлять различными исполнительными устройствами.
Микроконтроллер на плате программируется при помощи языка Arduino (основан на языке Wiring) и среды разработки Arduino (основана на среде Processing). Проекты устройств, основанные на Arduino, могут работать самостоятельно, либо же взаимодействовать с программным обеспечением на компьютере (например, Flash, Processing, MaxMSP). Исходные чертежи схем (файлы CAD) являются общедоступными, пользователи могут применять их по своему усмотрению.
Актуальность исследования: в современном мире человек допускает много ошибок из-за своей безответственности и лени. Мой проект «Умная школа на базе микроконтроллера Arduino Uno» позволит вычеркнуть человеческий фактор и всё работу предоставить «роботу». Автономные системы будут делать всю предоставленную работу. Робот в отличии от человека не устаёт и у него нет «срочных дел» как у человека, а значит робот будет более ответственным и пунктуальным.
Цель исследования: создать школу в которой вся основная работа, выполняемая человеком, будет выполняться роботом.
Гипотеза: работа, выполненная роботом, будет качественнее и точнее, чем работа, выполненная человеком.
Практическая значимость исследования: данная работа может применятся при проектировании любой школы или детского сада.
Новизна исследования: На сегодняшний день существуют очень много работ, посвященных роботам и автономным системам. Однако я решил изучить эту тему на примере своей гимназии, для того, чтобы мой проект можно было бы применить при проектировании и строительстве другой новой и современной школы, безопасной и комфортной для детей и в этом заключается новизна нашего исследования.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ И ЛИТЕРАТУРЫ:
Интернет ресурсы:
http://hi-news.ru/robots/pochemu-luchshe-doveryat-robotu-a-ne-cheloveku.html
https://ru.wikipedia.org/wiki/Arduino
Литература:

Название: Дистанционный мониторинг физических параметров технологического оборудования.
Автор: Гречин Валерий Сергеевич.
Образовательное учреждение: МБОУ Лицей №3 г. Курчатова.
Научный руководитель: Ильина Елена Анатольевна, преподаватель физики в МБОУ Лицей №3.
Цели и задачи:
Тезисы: Для решения задачи удаленного мониторинга я решил создать устройство на базе микроконтроллера ESP8266. Данный микроконтроллер имеет в своем составе Wi-Fi модуль, что позволит передавать измеренную телеметрию без использования проводов.
Разработка началась с проектирования принципиальной электрической схемы. После этого было необходимо подготовить печатную плату для сборки и пайки устройства. Для программирования был использован язык Wiring. Структура программы состоит из трех частей:
Анализировать измеренные данные можно на специальном сайте с помощью любого устройства, имеющего доступ к сети Интернет.
Актуальность исследования: Исследуя применимость проекта, можно выделить несколько основных сфер человеческой деятельности, где устройство имеет наиболее высокую значимость:
Атомная промышленность. Объектами контроля в этой отрасли является различное электротехническое оборудование, системы охлаждения, различные резервуары и пр. Использование устройства позволит, например, оценить температуру охлаждающей жидкости не покидая рабочее место.
Тепличное хозяйство. В каждой теплице для хорошего урожая необходим правильный микроклимат, для этого необходимо постоянно следить за уровнем температуры, влажности, освещенности и прочих параметров, однако организовать круглосуточное пребывание персонала на рабочем месте сложно и затратно. С помощью созданного устройства, специалист, имея выход в Интернет, может увидеть все необходимые параметры жизнедеятельности растений дистанционно.
Быт. Одним из примеров использования устройства является контроллирование температуры и влажности в комнате младенца.
Значимость и новизна исследования: Исследуя готовые решения поставленной проблемы, одной из важнейших проблем является стоимость оборудования мониторинга и диагностики. К примеру, такая система как АСКДГ(Автоматизированная система контроля и диагностики генераторов), используемая на атомных объектах, имеет цену в несколько миллионов рублей и не отличается простотой в использовании. Применение таких дорогостоящих систем не позволит создать систему для контроля всего оборудования, которое используется на АЭС. Для сельскохозяйственной сферы также имеется готовое решение - метеостанции, однако их цена также обладает высоким показателем, достигая нескольких десятков тысяч рублей, что также ограничивает повсеместность применения таких систем мониторинга. Значимость моего проекта заключается в его стоимости, которая по завершению разработки составила менее 250 рублей. Также преимуществом является энергоэффективность, благодаря которой устройство может исправно функционировать продолжительное время от батарей/аккумуляторов или солнечных панелей. Плюсом разработки является компактный размер (В3см, Ш5см, Д8см) и простота в использовании для конечного пользователя, которому необходимо лишь выбрать точку доступа к сети, зарегистрировать канал для приема данных и переместить устройство в рабочую зону.
Итоги исследования: удалось выявить проблему, которую можно решить с помощью информационных технологий, удалось выполнить все поставленные задачи. Построить дальнейший план улучшений проекта. Повысить личные инженерные навыки, встретиться с большим количеством проблем в ходе решения и успешно их разрешить.

Умная одежда на базе микроконтроллера arduino поможет человеку выжить в сложной ситуации, даже вдали от цивилизации. Bluetooth-модуль обеспечит связь между телефоном на базе android и платой arduino uno. Широкий спектр применения. который ограничивается только фантазией конкретного пользователся и имеющимися в наличии датчиками. Текущая версия представляет собой жилет, что позволяет носить данную одежду круглый год.

«Нейрокриптография и нейрокриптоанализ. Реализация протокола синхронизации ключей двух абонентов на базе нейронных сетей и его применение»
Автор: Плотников Егор Андреевич, Республика Марий Эл, г. Йошкар-Ола, ГБОУ РМЭ “Политехнический лицей-интернат”
Научный руководитель: Кожанова Анна Михайловна, учитель информатики.
Цель: Показать возможность применения нейрокриптографии в реальных проектах. Создать реализацию алгоритма на базе нейронных сетей для синхронизации закрытого ключа у двух абонентов, используя открытый канал связи.
Задачи: изучить возможность применения нейронных сетей в криптографии для реальных проектов, создать кросс-платформенную реализацию библиотеки, включить в неё весь необходимый функционал, поделиться результатами работы с open-source сообществом.
Методы исследования: для разработки проекта использовался ресурс GitHub (ссылка на репозиторий проекта: https://github.com/egorplotnikov/NeuralCryptography ). Сейчас разработка ведется на языке C# (платформа mono, операционная система GNU/Linux), в дальнейшем планируется написать ещё две версии на языках Java и C++.
Актуальность:
С каждым годом компьютерная информация играет все более важную роль в нашей жизни, и все большую актуальность приобретают проблемы ее защиты.
Защита от каждого типа опасности предполагает собственные решения. Впрочем, есть и универсальные подходы, способные обезопасить данные от разных угроз. Одним из них является нейрокриптография - раздел криптографии, изучающий применение стохастических алгоритмов, в частности, нейронных сетей, для шифрования и криптоанализа. В данном проекте реализован протокол синхронизации закрытых ключей на базе нейронных сетей для иллюстрации практического применения подобной технологии в коммерческих проектах.
Значимость и новизна:
Данная работа призвана показать новые пути для развития информационной безопасности благодаря нейрокриптографии. Эта область достаточно молода, и пока не имеет практических применений. Однако уже сейчас она может использоваться там, где есть непрерывная генерация ключей.
Также эта работа призвана решить ряд проблем, возникающих в классическом варианте реализации, предложенном В.Кинцелем и И.Кантером.
Итоги: в результате был создан первый рабочий образец, способный наглядно показать процесс синхронизации и произвести некоторые оценки, также были разработаны и реализованы варианты решения проблем классической версии алгоритма и заданы векторы дальнейшего развития. Проект находится в стадии активного развития, и любой желающий может принять в нем участие (сейчас все исходные коды доступны на GitHub-е и распространяются под лицензией MIT).
Была проделана большая работа, связанная с изучением англоязычного материала, что помогло автору решить поставленные задачи.
Список литературы:
"Analysis of Neural Cryptography" by Alexander Klimov, Anton Mityaguine, and Adi Shamir.
"Permutation Parity Machines for Neural Synchronization" Oscar Mauricio Reyes; Ingo Kopitzke & Karl-Heinz Zimmermann.
"Successful attack on permutation-parity-machine-based neural cryptography" Luís F. Seoane & Andreas Ruttor.
"Genetic attack on neural cryptography" Andreas Ruttor; Wolfgang Kinzel;
“Защита информации в компьютерных системах и сетях” Романец, Ю. В.
“Прикладная криптография. Протоколы, алгоритмы, исходные тексты на языке СИ” Шнайер Б.

Научно-техническая работа
Принтер Брайля
Фадеев Александр, Салаватов Вадим
ГБОУ «Президентский физико-математический лицей № 239»
Научный руководитель: Перминов Андрей Олегович, научный сотрудник ФИЦ ИПФ РАН
Цель проекта – создание дешевого устройства, печатающего рельефно-тактильным шрифтом.
Описание научно-технической работы:
Для создания принтера мы использовали основу от старого матричного принтера. Принцип печати собранного нами устройства напоминает также напоминает матричный. Главным отличием является отсутствие ленты. Жесткий прижимной резиновый цилиндр заменен на мягкий картонный для снижения износа иглы. Как известно, работа матричных принтеров базируется на шаговых двигателях, для управления которыми мы использовали микроконтроллер Arduino UNO и драйвер для шаговых двигателей Motor Shield L293D.
Актуальность, значимость и новизна работы: Основной проблемой существующих принтеров, печатающих шрифтом Брайля является их стоимость. Эти устройства крайне необходимы, ведь для слепых и слабовидящих людей чтение – один из важнейших способов восприятия информации. Однако далеко не каждый человек, а иногда и организация, может позволить себе приобрести такой принтер.
Итоги: На данный момент создан работающий образец принтера, печатающего шрифтом Брайля, который экономически гораздо выгоднее представленных на рынке устройств. Значимость проделанной работы в общем контексте задачи достаточно высока. Единственным параметром, требующим доработки, является скорость печати.
В заключении хотелось бы отметить, что на рынке практически отсутствуют подобные принтеры Российского производства, поэтому приходится выбирать дорогие зарубежные аналоги. Наш принтер экономически выгоднее всех существующих устройств. Как уже было сказано, единственным недостатком является скорость печати. У нас есть много идей и технических решений, применимых к данному проекту для решения этой проблемы. Мы уверены, что повышение качества печати не сильно отразится на стоимости устройства и не повлияет на его экономическую эффективность.

Создание программы-композитора
Автор: Полтарыхин Матвей Сергеевич
Гимназия ТюмГУ
Научный руководитель: Бородина Елена Николаевна, преподаватель фортепиано МАОУ ДОД ДШИ «Этюд», композитор.
С течением времени музыка терпит изменения за счёт новых технологий. Происходит её модернизация, появляются новые инструменты, способы записи мелодий и их воспроизведения. Отпала необходимость иметь реальные инструменты под рукой. Весь оркестр теперь легко помещается в телефоне или планшете. Неизменным остаётся лишь одно – музыку сочиняет человек. На сегодняшний день не создано ни одного программного продукта, в чьи функции входила бы генерация мелодий. Создание такового могло бы привести к настоящей революции в музыкальной и IT-индустрии, а также это, вероятно, один из путей к созданию искусственного интеллекта, ведь создание музыки на данный момент - процесс, присущий только лишь человеческому мозгу. Поэтому вопрос создания программы-композитора актуален.
Цель этой работы заключается в том, чтобы создать многофункциональную программу, в основе которой будет лежать алгоритм, результатом выполнения которого является последовательность нот, при воспроизведении которых получается музыкальная мелодия, на слух не отличимая от человеческой.
Для достижения этой цели необходимо решение следующих задач:
1.Определить на основе анализа классических произведений особенности, которые присущи большинству гармонических мелодий.
2.Составить алгоритм для получения последовательности нот.
3.Создать на основе алгоритма программу, способную создавать, сохранять и воспроизводить музыку.
В ходе работы было проанализированы несколько классических произведений на предмет закономерностей, схожих особенностей, которые позволили бы выстроить общие критерии для гармоничной, то есть красивой мелодии. Для анализа были использованны знания о музыкальной грамоте и гармонии, общие правила написания музыки.
После сбора теоретических данных была создана программа-композитор, в чьи функции входит генерация мелодии, её прослушивание, визуализация в виде нот, сохранение в память для последующего повторного воспроизведения. При этом был использован движок Unity (2D режим), а все скрипты написаны на языке C#.
Путём опроса было проведено тестирование готовой программы, в ходе которого было выявленно, что более половины опрашиваемых не смогли отличить мелодию, сочинённую программой от мелодии человеческого авторства.
Готовая программа может быть использована как генератор мелодий для обучающегося игре на фортепиано и уже опытного композитора для помощи в написании музыки. Помимо всего, данное исследование приближает нас ещё на один шаг к пониманию и улучшению методов имитирования сложнейших процессов, которые происходят в мозге человека.
Использованная литература:

Роботизированная платформа «LIZA» ,основанная на принципе магнитной левитации, в отличие от своих амортизирующих собратьев, предотвращает всевозможные механические воздействия опоры на подвеску, тем самым повышая износостойкость робота. Но также эта тема имеет свое продолжение - данный проект является началом целой исследовательской работы, целью которой является создание робота буквально левитирующего над опорой, путем сканирования поверхности при помощи ультразвука и регулировки мощности в индукционных катушках. Это позволит создать абсолютно непоколебимую платформу, что открывает поистине необозримые практические возможности. Именно поэтому эта тема для меня очень актуальна.

Создание роботизированной платформы, основанной на принципе магнитной левитации.
Шигабудинов Артём Русланович (Свердловская область, г. Екатеринбург, МАОУ Лицей №128, 10 класс);
Филимонова Юлия Игоревна – руководитель технического кружка ( МАОУ Лицей №128);
Минувшие эпохальные этапы развития робототехники, если не лишили, то ограничили нас в новаторстве, оставив довольствоваться лишь микро-инновациям
Именно по этой причине я выбрал стезю микро-инноваций, дабы «вновь не изобретать велосипед».
На данный момент, у нас повсеместно используются подвески с амортизаторами, которые увеличиваютнивелирование колебательных движений платформы, получаемых в процессе движения. Но в некоторых случаях этого бывает недостаточно: при бережной доставке пострадавших в машине скорой помощи, возможности оперирования их на ходу; при транспортировке снарядов, хрупких вещей; Платформа «LIZA» является рабочим решением данной проблемы с достаточным использованием электроэнергии для внедрения ее в производство.
Цель исследования: создание роботизированной платформы, основанной на принципе магнитной левитации.
Таким образом, в ходе проделанной работы я воплотил изученную теорию
в практику. Теория интегрировала в себя знания, как из школьного, так и из углубленного курса.
Список использованной литературы:
http://znanieavt
http://www.physi
Я.И.Перельман. Занимательная физика. Книга 2;
transporton.ru;
В.Карцев. Магнит за три тысячелетия;
science.ua/2010/
«Модернизация системы управления лифтом «Умный лифт»
Рогозин Константин Андреевич,
МОУ «Средняя школа № 36» г. Ярославль
Кондратенко Кирилл Сергеевич,
МОУ «Гимназия № 3» г. Ярославль
Научный руководитель/наставник:
Цветков Дмитрий Юрьевич,
педагог дополнительного образования
ГОАУ ДО ЯО «Центр детско-юношеского технического творчества»
Актуальность работы. Отличительной чертой современных городов является многоэтажное жилье. Обязательным в доме является наличие лифта в каждом подъезде, что должно облегчить перемещение жильцов. Однако часто возникает проблема ожидания лифта на своем этаже: он проезжает вверх или вниз, не останавливаясь. Например, в утренние часы лифт везёт одного человека с одного из верхних этажей на первый, а в это время ожидает посадки много людей на других этажах, а лифт проезжает мимо. Это приводит к увеличению времени ожидания, а также ведёт к повышению энергопотребления при перемещении пассажиров и грузов. Актуальность проблемы не вызывает сомнения. Современные условия жизнедеятельности человека уже не представляются возможными без использования подъемного транспорта, а его работа (ожидание, время доставки, затратность и т.д.) оказывают огромное влияние на человека, и оно не всегда положительное. Поэтому тема эргономичности и энергосбережения сегодня очень важна для рассмотрения. Особенно остро ощущается эта проблема в домах старых постройки, которых в России очень много. Можно ли в них обойтись без дорогостоящей замены лифта?
Проблема исследования состоит в том, что на фоне технического прогресса и развития техники в целом и электроники в частности, блоки управления лифтами старой конструкции устарели и требуют замены или модернизации
Объект исследования: лифт многоэтажного дома старой постройки. Предмет исследования: блок управления лифта многоэтажного дома старой постройки
Целью исследования: охарактеризовать способ модернизации блока управления лифтом старой конструкции.
Для достижения поставленной цели поставлены следующие задачи: 1) изучение принципа работы лифта в домах старой постройки; 2) выявление недостатков в блоке управления лифта старой конструкции; 3) разработка алгоритма движения лифта, эффективного с точки зрения уменьшения времени ожидания и энергозатрат; 4) описание электронного блока управления, реализующего разработанный алгоритм движения лифта.
Под лифтами старой конструкции рассматриваются лифты, изготовленные в период до конца 90-х годов 20-го века
Методы исследования: анализ технической документации, схем, наблюдение за работой лифта старой конструкции, эксперимент.
Личный вклад и новизна исследования была составлена управляющая программа; разработан и собран электронный блок управления, который с небольшими доработками может быть использован на уже установленных лифтовых агрегатах промышленного производства.
В первой главе были рассмотрены основные принципы работы лифта и выявлены основанные недостатки его работе:
Во второй главе были представлены алгоритмы движения лифта в зависимости от различных ситуаций. Эти ситуации были обусловлены изменением следующих параметров: текущее местонахождение стоящего и движущегося лифта; направление движения лифта; число вызовов и расположение соответствующих им этажей относительно текущего положения лифта; загрузка лифта (число пассажиров в нем). Другие алгоритмы, не касающиеся движения, например, связанные с экстренной остановкой лифта или с защитными функциями, и не требующие модернизации, в данной работе не рассматривались.
После завершения изучения работы лифта нами был создал электронный блок управления, написана управляющая программа и изготовлена действующий макет лифта для тестирования и отладки разработанного алгоритма.
Таким образом, на основе составленных алгоритмов, можно написать программу для рационального управления лифтом.
В процессе работы нами была составлена управляющая программа; разработан и собран электронный блок управления, который выполнен на базе программно-аппаратного комплекса Arduino (UNO, но можно использовать отдельно микроконтроллер с необходимой обвязкой). Для управления макетом кабины лифта используется шаговый двигатель с самостоятельно изготовленным драйвером. Также сделана индикация этажа, на котором находится лифт и индикация открытой двери, наличия задания и движения. Для демонстрации работы данного блока был изготовлен действующий макет.
Макет лифта состоит из шести «этажей», на каждом из которых размещена вызывная кнопка; кабины, с датчиками «веса» пассажиров; блока управления.
Принципиальная схема устройства прилагается.
В ходе исследования был разработан и изготовлен блок управления, который с небольшими доработками может быть использован на уже установленных лифтовых агрегатах промышленного производства. А именно: согласование логических уровней систем установленных на лифтовых агрегатах промышленного производства с этим блоком управления, использования мощных коммутационных устройств (тиристоров, симмисторов, реле и т.д.) для управления тяговым электродвигателем.
В заключении были сформулированы основные выводы исследовательской работы.

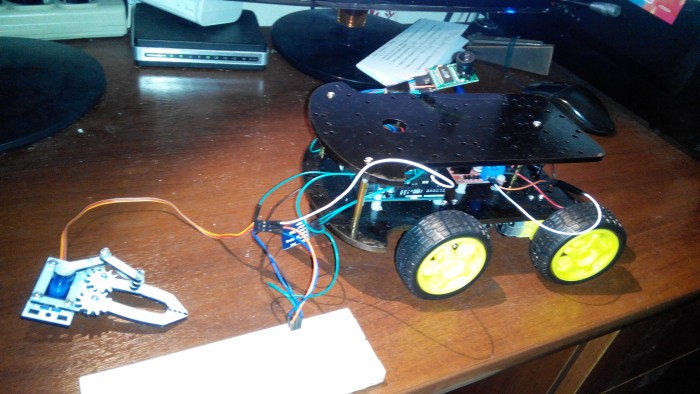
Целью данной работы является совершенствование колесного робота, представленного на XVIII Международной конференции научно-технических работ школьников «Старт в Науку». Совершенствование робота заключалось в установки бортовой камеры, необходимой для наблюдения окружающей среды при движении колесной платформы, установки макета манипулятора, а также устранении замечаний высказанных в процессе обсуждения результатов первого этапа на конференции.
Для достижения поставленной цели были решены следующие задачи:
- исследованы способы подключения различных камер к плате Arduino UNO с учетом беспроводного управления роботом и устойчивой передачи изображения с камеры;
- выявлено наиболее простое по технологичной реализации и фактической стоимости решение по реализации робота;
- повышена надежность конструкции колесной платформы;
- разработан и в программном виде реализован интерфейс удаленного управления перемещением роботом, управления манипулятором с учетом приема изображения с камеры.
Работа состоит из исследовательской и практической частей.
В исследовательской части рассмотрены различные способы сопряжения камеры с платформой Arduino UNO.
Был проведен сравнительный анализ способов сопряжения камеры по критериям простоты технологической и программной реализации, а также стоимости реализации.
Были реализованы:
- передача изображения с камеры на Android-приложение;
- передача команд на Arduino UNO с Android-приложения и модификация робота до возможности управления моторами; результат модификации – прототип робота «Полночный свет - 1»;
- модификация робота до возможности управления моторами и сервоприводами, установка Wi-Fi веб-камеры; результат модификации – прототип робота «Жук-Рогач».
Видеоотчет испытаний робота «Жук-Рогач» представлен по ссылке: https://www.youtube.com/watch?v=t9-qqztlXag
 |
 |
 |
Список литературы

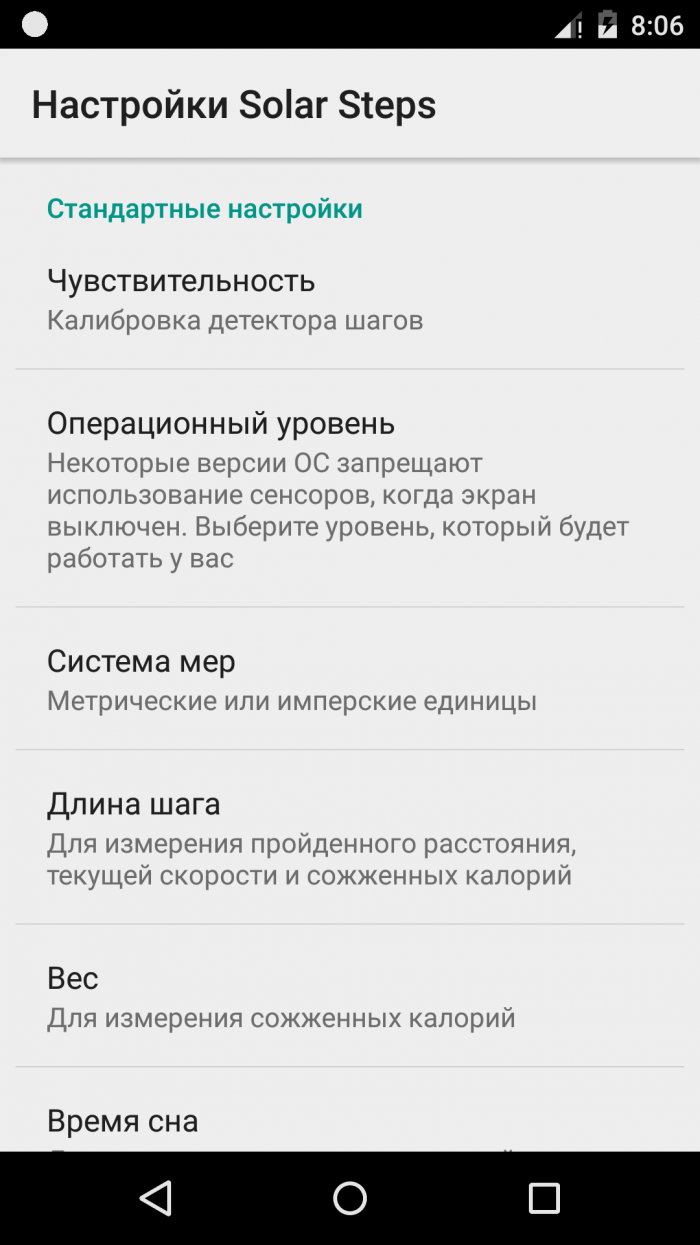
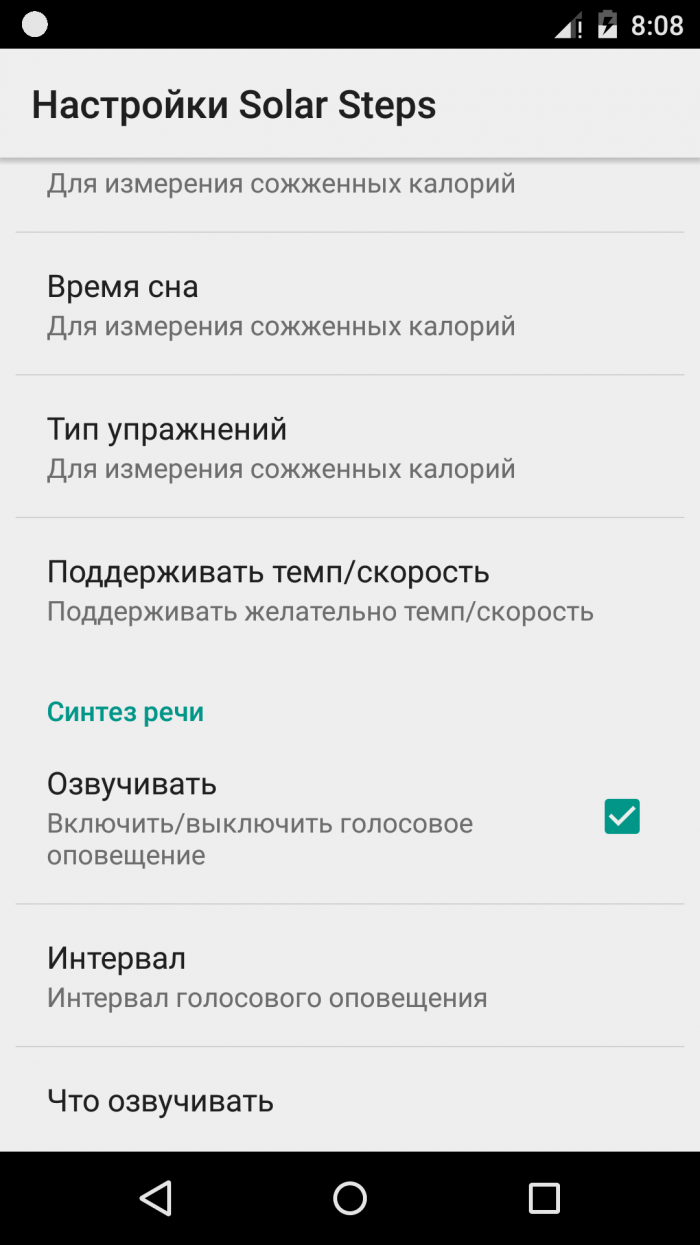
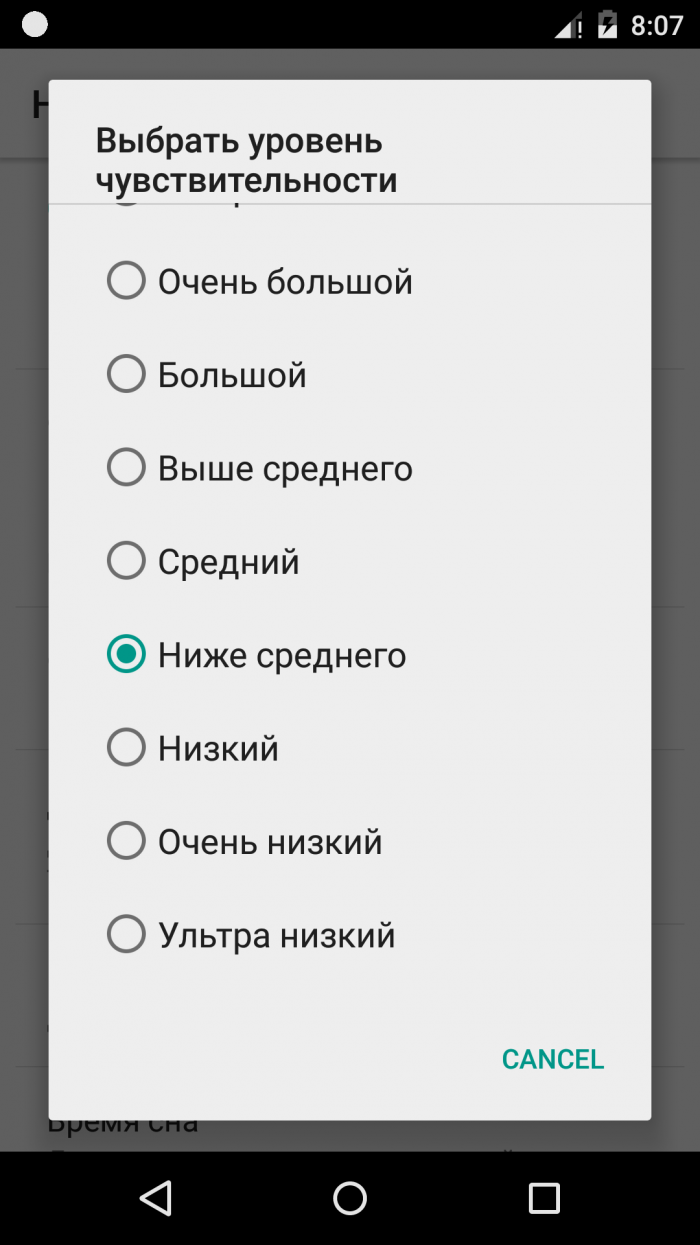
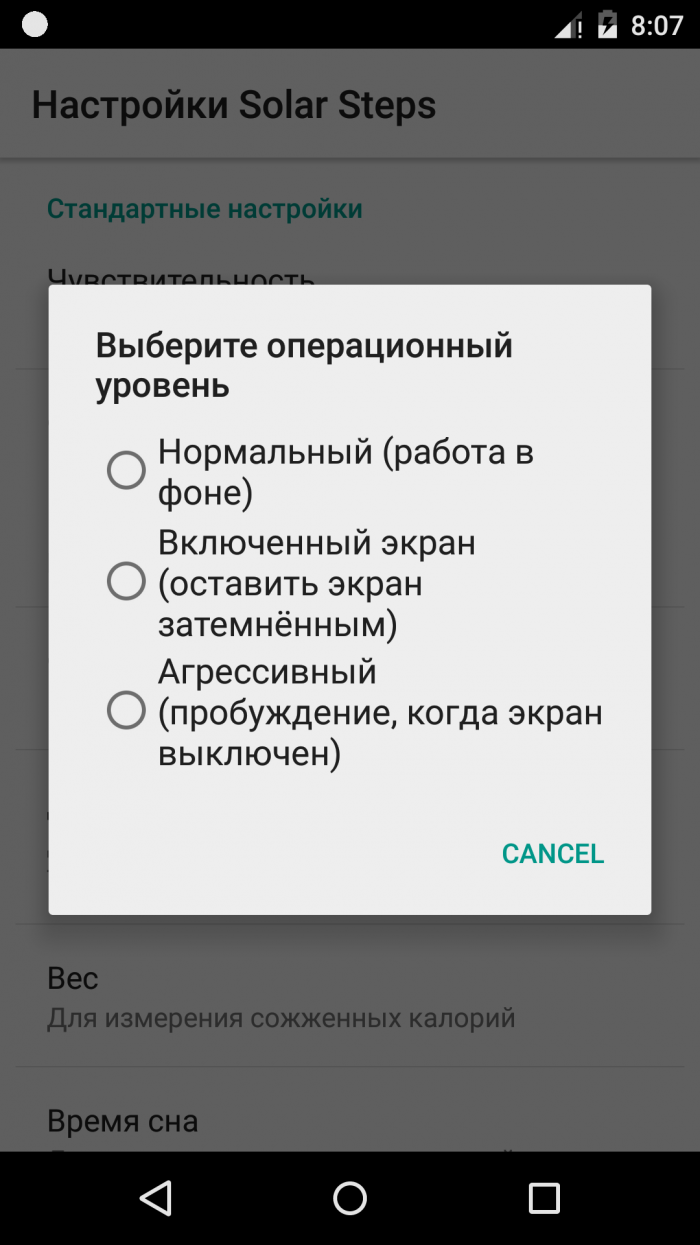
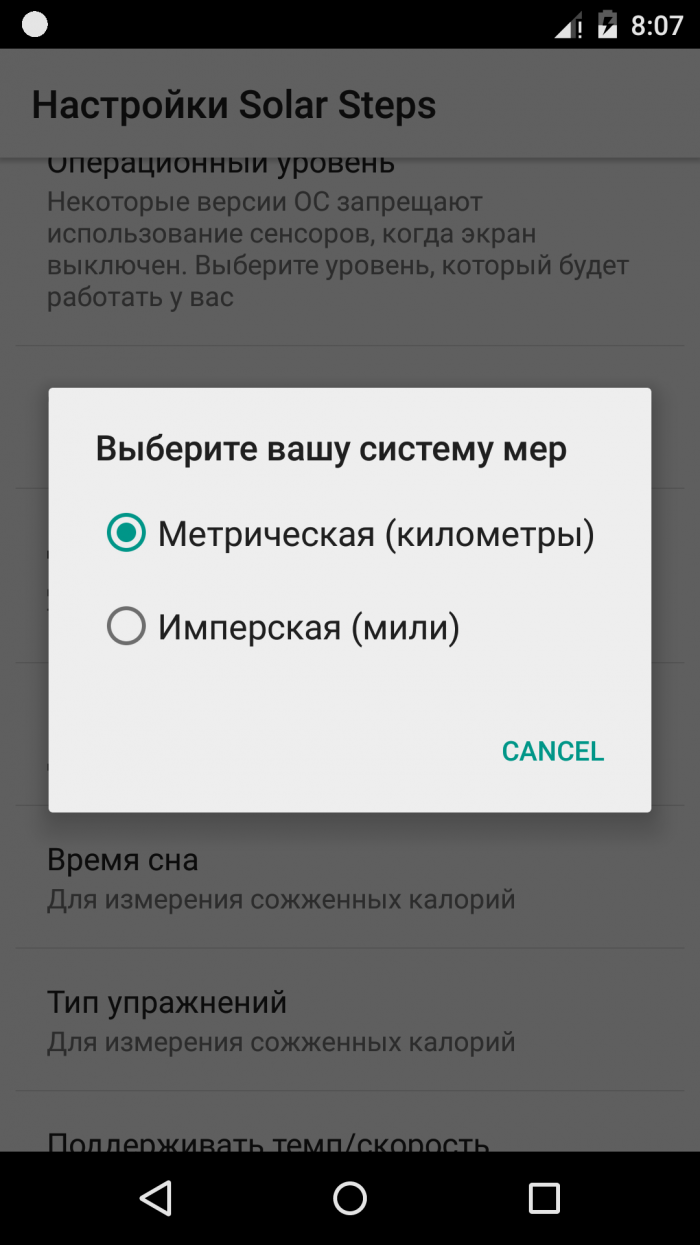
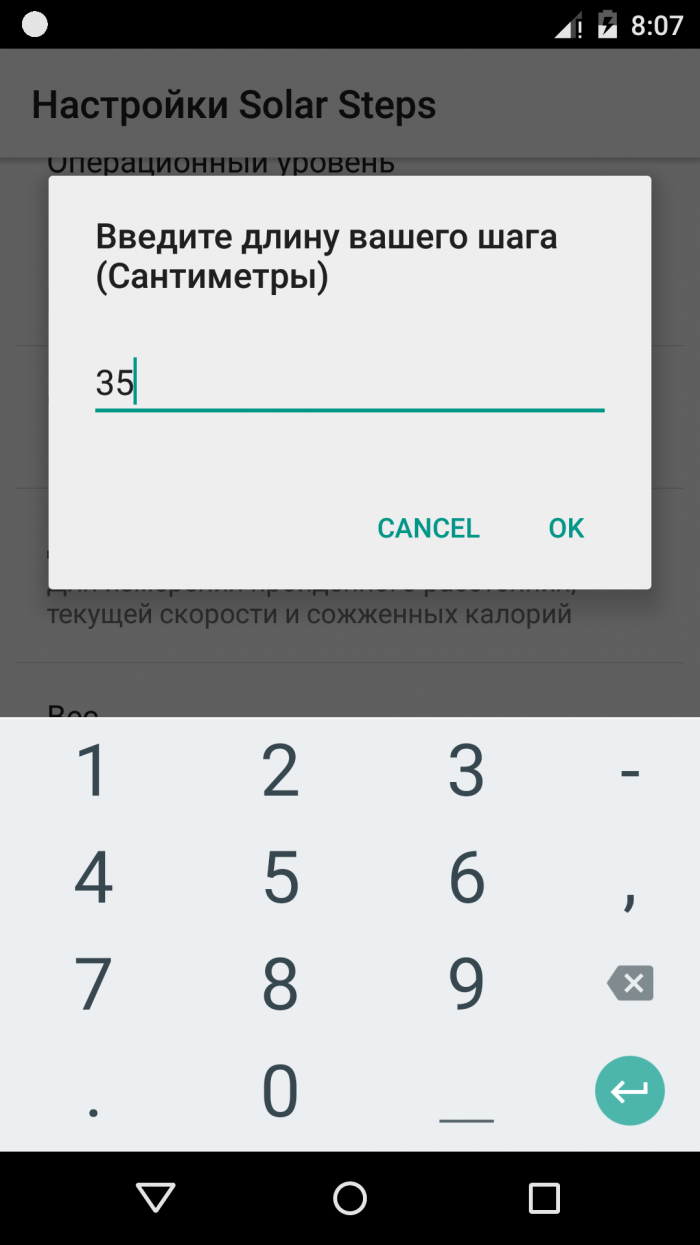
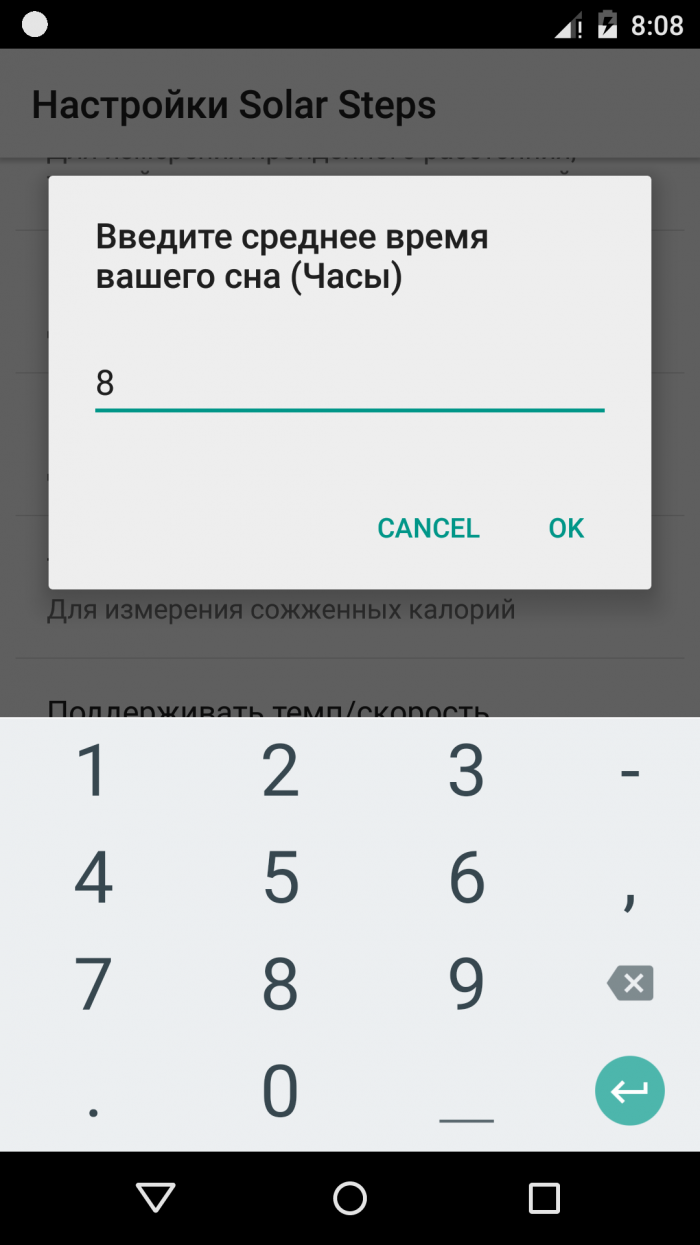
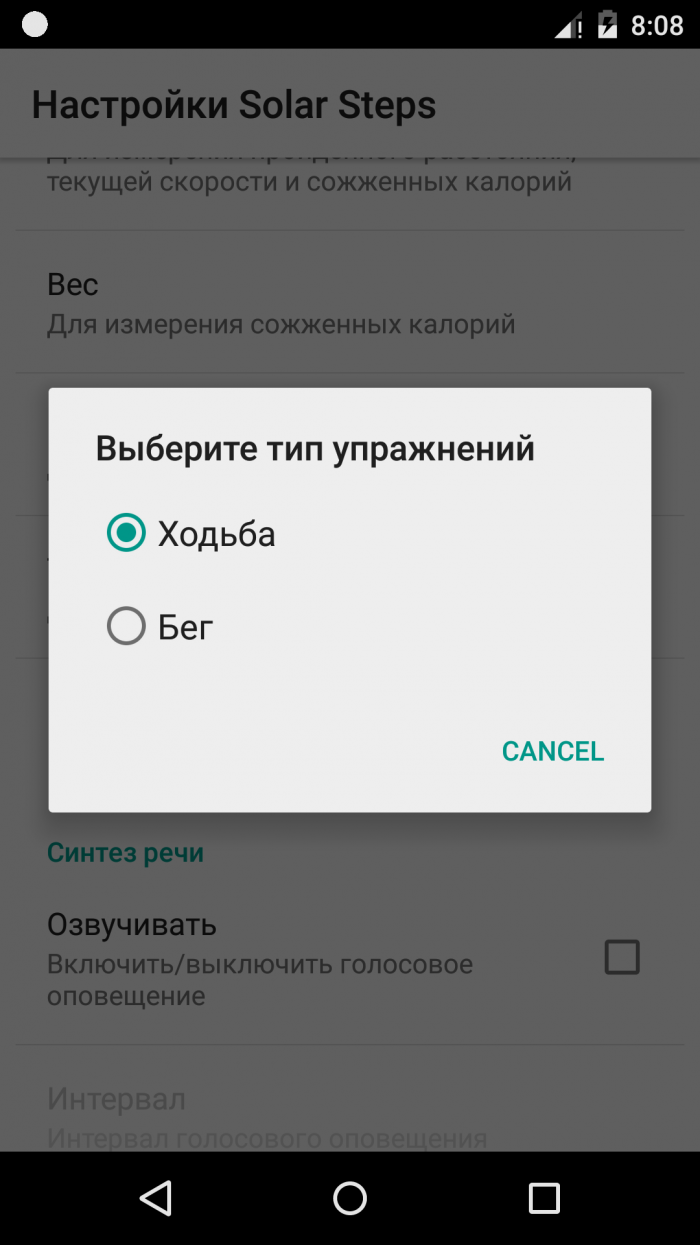
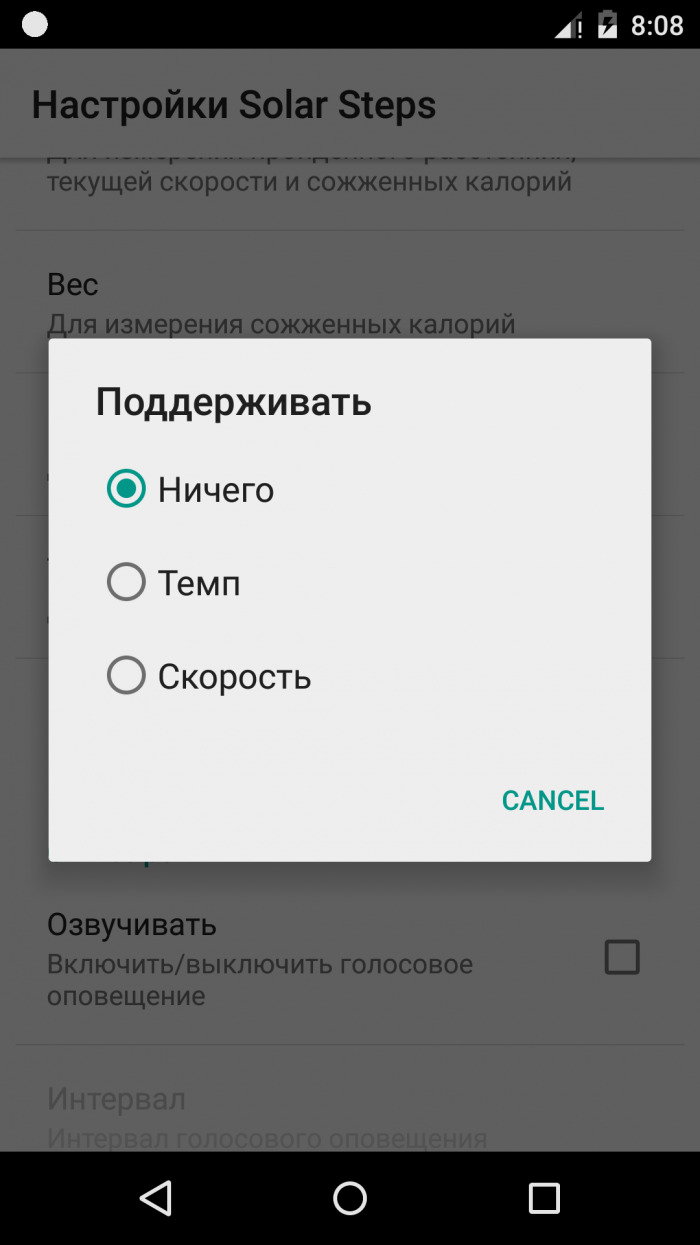
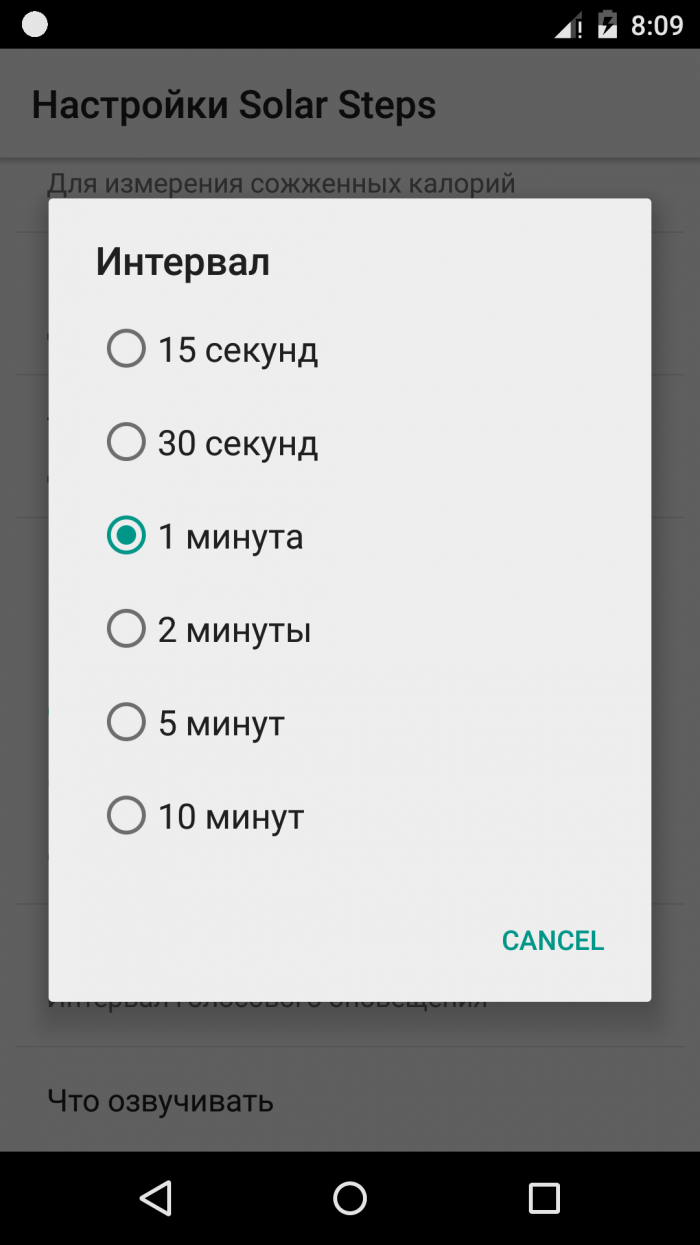
Приложение-шагомер “Solar Steps”, использующее погодные данные для инновационного подсчета калорий
Автор: Стукалов Денис Андреевич.
Образовательное учреждение: ГУО гимназия №10 г. Минск.
Научный руководитель: Стукалов Андрей Александрович, программист-аналитик, начальник отдела информационной безопасности в ООО “Белинвестбанк”.
Цель: разработать инновационное энергоэффективное приложение-шагомер для подсчета калорий с использованием погодных данных метеосервисов.
Задачи: изучить существующие алгоритмы измерения шагов и пройденного расстояния с помощью встроенных датчиков в смартфоне (гироскоп, акселерометр). Изучить сущность формулы Харриса Бенедикта и использовать её для подсчета суммарного количества сожжённых калорий, зависящих от продолжительности сна, количества пройденных шагов, а главное, от температуры окружающей среды.
Суть исследования: кол-во калорий, сожжённых человеком, подразделяется на 3 фактора: кол-во сна, кол-во пройденных шагов, температура окружающей среды. Если первые два фактора каким-то образом задействованы в похожих приложениях, то третий является инновационным и наиболее близко подводящим к наиболее точным результам.
Актуальность: исследование и разработка приложения являются одними из наиболее актуальных тем в текущем времени, т.к. с течением времени возрастает кол-во людей с ожирением. К примеру, в России процент людей, страдающих избыточной массой тела или ожирением составляет 24,9 %. Поэтому, чтобы бороться с этой достаточно распространённой всемирной проблемой, нужно предпринимать какие-то меры, одной из которых является это приложение.
Значимость и новизна: в настоящий момент аналогов этому приложению нет, т.к. оно использует максимально большое кол-во факторов, влияющих на точность измерения сожжённых калорий, и превносит в жизнь обычных людей немного устремлённости и позитива. Также приложение является достаточно простым для понимания, нересурсоёмким и энергоэффективным, т.к. при длительном отсутствии активности фоновая активность приложения приостанавливается и при возобновлении активности вновь продолжается, поэтому, исходя из экспериментального опыта, приложение максимизировано для простоты усвоения, энергоэффективности и, с точки зрения новизны, действительно первое в своём роде.
Итоги исследования: в результате разработки приложения было использовано большое кол-во различных материалов и формул, способствующих созданию приложения, намного более точно вычисляющего кол-во сожжённых калорий и дающее надежду многим людям, страдающим ожирением, шанс на скорейшее выздоровление. Согласно проведённому опросу, не менее 86% людей действительно заинтересованы в таком приложении.
Ссылка на исходный код приложения: https://github.com/skat1452/SolarSteps
Ссылка на apk приложения: https://drive.google.com/file/d/0Bxd5UMCC_M7kYi15aTFDakpZalE/view?usp=sharing
Использованная литература в результате разработки приложения:
http://startandroid.ru/ru/uroki/vse-uroki-spiskom
http://zdorovko.info/formula-xarrisa-benedikta/
http://www.nature.com/ejcn/journal/v56/n4/full/1601308a.html
Скриншоты будут прикреплены здесь же.



Геоинформационна
Автор: Никишева Мария Вячеславовна
МАОУ «Гимназия №5», г. Чебоксары, Чувашская Республика
Руководитель: Профессор Никишев Вячеслав Константинович,
Чувашский государственный университет им. И. Н. Ульянова, кафедра компьютерных технологий, факультет информатики и вычислительной техники
Цель и задачи исследования:
В настоящее время вопросы экологии приобретают важное значение во всех странах мира. Поэтому новый 2017-й год объявлен годом экологии. Окружающая Землю атмосфера представляет собой сложную природную систему, в которой протекают тесно взаимосвязанные процессы различной природы: динамические, химические, физические.
Ухудшение общей экологической обстановки на Земле, необходимость достаточно точно прогнозировать и принимать оперативные решения по преодолению последствий загрязнения требуют создания специальных математических моделей оценки степени загрязнения атмосферы, отражающих всю сложность происходящих здесь явлений. Полученные с помощью таких моделей данные по степени загрязнения атмосферного воздуха помогут контролировать качество окружающей природной среды, контролировать предельно допустимые выбросы загрязняющих веществ промышленными предприятиями, проводить регулярный мониторинг фонового состояния.
Основными задачами являются:
-получения информации об источниках опасных загрязнений окружающей атмосферы с использованием датчиков, расположенных в зонах наиболее возможных выбросов ( заводов, предприятий, ферм и т. д или датчиков, расположенных на беспилотных летательных аппаратов БПЛА;
- передача информации на пункты управления МЧС с использованием навигационной систем ГЛОНАСС и последующей передачей на сайты Экология Чувашской Републики или сайт МЧС Чувашской Республики;
- ввод информации на электронную карту местности, которая имеется на сайте;
- определения зон заражения для каждого опасного выброса продуктов с учетов координат цента выброса, температуры, скорости ветра;
- определения для каждого пользователя конкретных значений заражений по использованию статистического математического аппарата и численных методов перемещения продуктов заражения и времени возможного критическог значения для здоровья людей;
Основной текст тезисов научной проблемы
Успешное решение задач прогноза уровня загрязнения воздуха основано на использовании математических моделей, учитывающих физические особенности распространения примесей в атмосфере, связи между концентрациями примесей и метеорологически
Традиционные методы контроля базируются на точечном опробовании основных природных компонентов территории: воздушной, водной, почвенной среды. Анализ полученных данных сопряжен со значительными трудностями, связанными с отсутствием оптимального метода обработки данных. Основные трудности, возникающие при оценке, прогнозе, контроле и других аспектах процесса регулирования уровня загрязнения атмосферы связаны с ее высокой динамичностью как по времени, так и в пространстве, что обуславливает необходимость создания эффективных моделей, способов и методов, направленных на их научно-обоснован
Проблема обеспечения чистоты окружающей среды существует сегодня как в России, так и в Чувашской Республике, ибо ежегодный суммарный выброс вредных веществ в республике в атмосферу соответствует около 100 тысяч тонн, общее количество загрязняющих веществ, сбрасываемых стоками - 115 тысяч тонн, общая площадь эродированных сельскохозяйстве
В Новочебоксарске число специфических вредных веществ, содержащихся в выбросах АО "Химпром" составляет 107 наименований. Природоохранные и контролирующие органы свои выводы делают на основе исследования неспецифических вредных веществ. Характеристика же уровня загрязнения по результатам исследования специфических загрязнений в пробах атмосферного воздуха Новочебоксарска и его окрестностей формирует совершенно противоположное представление.
Влияние экологической среды крупных промышленных городов на здоровье населения Чувашской Республики. На территории Чувашской Республики наиболее крупными промышленными городами являются Чебоксары и Новочебоксарск. Мы уже знаем, что окружающая среда этих и других городов республики загрязняется вредными веществами. Причем уровень ряда вредных веществ в окружающей среде превышает предельно допустимые концентрации.
На основании этих данных можно заключить, что организм человека в условиях г. Чебоксары реагирует на воздействие загрязнений окружающей среды увеличением заболеваемости. Примерно аналогичные тенденции в изменении здоровья населения отмечены и по другому промышленному городу В данной ситуации правительству Чувашской Республики следует заниматься разработкой крупных экологических программ в промышленности, сельском хозяйстве, транспорте и поддерживать те научные направления, которые обещают более рационально использовать энергию и природные ресурсы.
Основными задачами Минэкологии Чувашской Республики как основного государственного природоохранного органа являются:
обеспечение комплексного управления в области охраны окружающей среды и природных ресурсов на основе принципов научно обоснованного сочетания экологических и экономических интересов общества;
установление допустимых норм и нормативов антропогенных нагрузок на окружающую природную среду;
координация деятельности министерств, ведомств, предприятий, учреждений и организаций в области охраны окружающей среды и природных ресурсов;
совершенствовани
организация и осуществление государственной экологической экспертизы, государственного контроля в области охраны окружающей среды и природных ресурсов;
оценка и прогнозирование состояния окружающей природной среды, ресурсного потенциала республики.
Кроме этого к компетенции Минэкологии Чувашской Республики относятся:
ограничение и приостановка деятельности предприятий и объектов (независимо от их подчиненности и формы собственности), если их эксплуатация осуществляется с нарушением природоохранного законодательства и лицензий на использование природных ресурсов и с превышением лимитов выбросов или сбросов загрязняющих веществ;
выдача разрешений на захоронение промышленных, коммунально-быто
предъявление исков о возмещении ущерба, причиненного в результате нарушения природоохранного законодательства
взимание платы за загрязнение окружающей среды;
обеспечение населения экологической информацией.
Данная работа посвящена вопросам оценки состояния экологической обстановки по данным, полученным от датчиков, регистрирующих выбросы в атмосферу, водные пространства вредных для здоровья людей веществ. Данные поступают на сайт " Экология Чувашии", по которым строятся области заражения с интенсивность заражения. В качестве вредных веществ могут быть: хлор, окись углерода, оксид азота и т. д.
На основе цели и задач была составлена информационная модель на основе языка программирования VC# для платформы Visual Studio 2015.
Общий вид форм представлен на рисунках.

Робот-парковщик на базе платформы Arduino
Мокин Арсений
г. Химки, МБОУ Лицей №11, класс 11-А
Научный руководитель: Сохова З. Б.
учитель информатики, МБОУ Лицей № 11, г. Химки
м.н.с. НИИСИ РАН , г. Москва
Область исследования: робототехника, искусственный интеллект, радиотехника, адаптивное поведение, нейронные сети.
Цель работы: разработать программируемого робота на базе Arduino, который сам выполняет парковку в различных условиях.
Ключевые слова: робот-парковщик, Arduino, нейронные сети.
Актуальность и новизна исследования: В последнее десятилетие ведущие автоконцерны оснащают автомобили различными интеллектуальными системами. В современных автомобилях появились такие функции, как система автоматической параллельной парковки, система камер кругового обзора, система автоматического управления светом фар, камеры ночного видения и т.д. Известно, что парковка наиболее часто вызывает трудности у неопытных водителей. Поэтому системы автоматической парковки сильно облегчают жизнь водителю. Исследования и усовершенствования таких систем ведутся активно и в настоящий момент.
Значимость исследования: Алгоритм работы робота может быть использован в реальных условиях на серийных автомобилях. Внедрение искусственного интеллекта в алгоритм парковки автомобиля даёт почву для будущих исследований в данной области.
В данной работе предлагается программируемый робот на базе Arduino, который демонстрирует возможность выполнить парковку задним ходом без участия человека в различных условиях.
Система помощи парковки задним ходом основана на вычислении расстояния до препятствий при помощи ультразвуковых датчиков. Автомобиль определяет наличие свободного места для парковки по своим размерам и автоматически заезжает на парковочное место, контролируя заданное расстояние до объектов.
Также рассмотрена возможность использования в будущем нейронных сетей. В частности, обнаружив место для парковки система, используя нейронную сеть сможет принимать решение насколько парковочное место удобно и безопасно. Например, будут учитываться такие параметры как площадь парковочного места, уровень освещенности, дальность от пункта назначения и др. В работе предлагается структура нейронной сети, которая сможет решать поставленную задачу.
Таким образом, разработан робот на базе платформы Arduino, который определяет возможность парковки и выполняет автоматическую парковку задним ходом без участия водителя. Продемонстирована работоспосбность робота и проведено тестирование в различных условиях.

Исследовательская работа
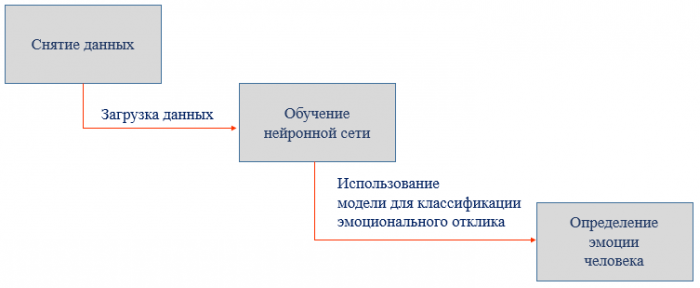
АЛГОРИТМ ОПРЕДЕЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ВАЛЕНТНОСТИ ЭМОЦИИ НА ОСНОВЕ ДАННЫХ ЭЛЕКТРОЭНЦЕФАЛОГРАММЫ
и реализованный на основании проведенного исследования проект
программное обеспечение, реализующее канал биологической обратной связи на основе нейроинтерфейса
Автор проекта: Пасечнюк Дмитрий Аркадьевич
Учреждение: МБОУ СОШ «Школа будущего», 8 класс, п. Большое Исаково, Калининградская обл.
Научный руководитель: Ботман Степан Александрович, инженер лаборатории нейробиологии и медицинской физик БФУ им. И.Канта, г. Калининград
Актуальность
Современные достижения в области регистрации потенциалов головного мозга и развитие вычислительных средств и методов, открывают новые возможности для создания принципиально новых систем управления информационной средой на основе мозг-компьютерных интерфейсов. Основной проблемой построения таких систем является получение объективной оценки нейрофизиологических коррелятов эмоционального восприятия визуальных сигналов.
Разработки, подобные представленной, найдут свое применение в областях нейромаркетинга, и окажут существенное влияние на сферы деятельности, требующие объективной оценки компетенций человека ввиду исключения человеческого фактора, таких как экзамен, собеседование, защита проекта.
Цель
Цель исследовательской работы - поиск оптимального из наиболее распространенных при анализе временных рядов алгоритмов анализа данных при определении и прогнозировании валентности эмоционального отклика на графический стимул на основе данных ЭЭГ-сигнала человека.
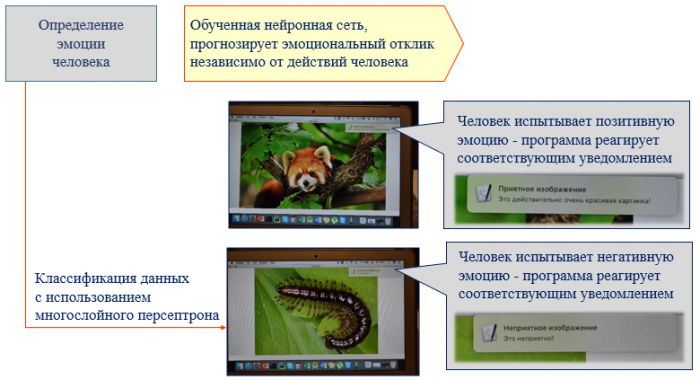
Цель проектной работы - создание программного продукта, реализующего канал биологической обратной связи на основе нейроинтерфейса, позволяющего определить эмоциональный отклик на визуальный стимул на основе данных сигнала ЭЭГ и отобразить полученную информацию на компьютере пользователя.
Задачи
1.Изучение существующих подходов и современных инструментов анализа ЭЭГ человека;
2.Определение наиболее значимых признаков ЭЭГ-сигнала при классификации эмоционального отклика на графический стимул;
3.Сбор и первичный анализ (разметка) экспериментальных данных, включающих в себя значения выделенных признаков ЭЭГ и валентность (тон) эмоционального отклика, испытываемого в определенный момент времени;
4.Выбор оптимального алгоритма анализа данных;
5.Разработка пользовательского интерфейса программы.
Методы
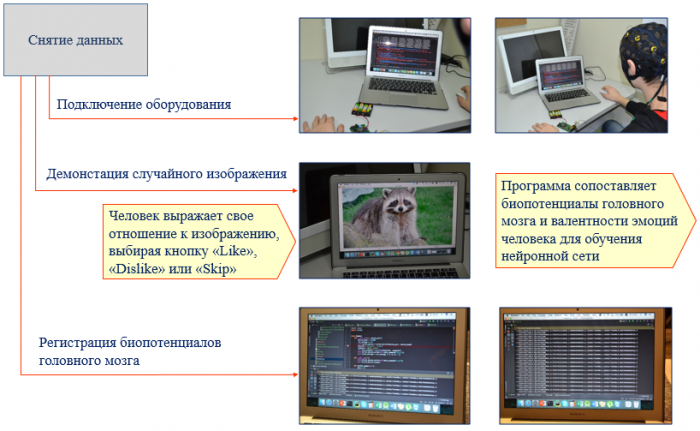
В качестве аппаратной части используется уникальное оборудование - устройство для регистрации биопотенциалов Balalaika v1.0 (разработка БФУ им. И. Канта).
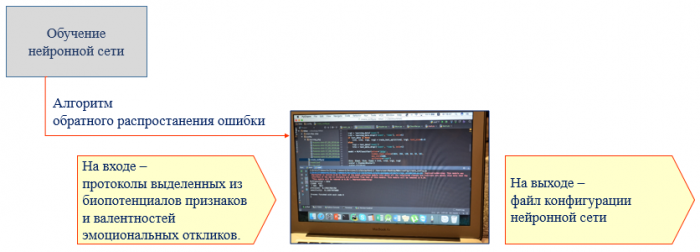
Для определения оптимального алгоритма машинного обучения производилась запись обучающих выборок, включающих в себя протоколы биопотенциалов человека и валентностей испытываемых им эмоций. Далее, для обучения алгоритма выделялись признаки ЭЭГ-сигналов и им сопоставлялись валентности эмоциональных откликов.
Для реализации программной части нейроинтерфейса написана программа на языке Python 3 с использованием библиотеки scikit-learn, работающая следующим образом:
Результаты
В результате выполненной работы определены наиболее значимые признаки сигнала ЭЭГ. В качестве алгоритма классификации выбран многослойный персептрон, в силу оптимальности показателей чувствительности и точности.
С учетом полученных результатов разработана и реализована программа, написанная на языке программирования Python 3 с использованием библиотеки анализа данных sklearn, обладающая простым интерфейсом, определяющая валентность (тон) эмоции человека и отображающая полученную информацию на экране монитора в реальном времени исключая физическое взаимодействие пользователя со стандартными интерфейсами ввода.

Автор работы: Корж Даниил Андреевич, ученик МБОУ г. Иркутска Лицея №1
Научный руководитель: Нефедьева Марина Анатольевна, учитель информатики
Главной целью проекта является разработка инструмента генерации и визуализации полученных ландшафтов с помощью одного из приведённых алгоритмов генерации карты высот с возможностью экспорта в большинство современных 3d редакторов путём прямого экспорта модели в формат wavefront (*.obj), либо с помощью экспорта полученной карты высот.
Идея данной работы состоит в том, чтобы облегчить создание ландшафтов для индустрии 3d моделирования и других, смежных с ней областей деятельности, таких как киноиндустрия, разработка компьютерных игр и.т.п.
Создание трёхмерного ландшафта является продолжительным трудом большого числа людей. Процедурная генерация позволяет ускорить процесс путём создания пусть и не идеальной, но подходящей для дальнейших преобразований, или использования в необработанном виде, заготовки. В результате, это сокращает сроки создания готовой локации для проекта с двух-трёх недель, до пяти-четырёх дней.
В настоящее время тема не имеет широкого обозрения со стороны мира IT, в силу своей инновационности, но она неуклонно развивается, с каждым днём находя всё новые и новые области применения. Работа по данной теме направлена на систематизирование существующей информации, исследование новых возможностей и алгоритмов, и призвана показать дальнейшие пути для развития данного направления.
Для разработки проекта использован игровой движок Unity3d, код написан на языке C# входящем в состав Microsoft .Net Framework, имплементирован алгоритм Diamond-Square. В качестве системы контроля версии использован git. Проект размещён в репозитории на интернет-ресурсе github.io (ссылка на репозиторий проекта: https://github.com/stylerkov/LandscapeGen).
Поставленная цель успешно выполнена. Создано standalone приложение-демонстрация. Исходя из полученных результатов, в перспективе возможно дальнейшее развитие созданного продукта путём увеличения площади генерируемого ландшафта, добавления дополнительных биомов и под-биомов, смены используемого генератора шума, комбинацией различных модификаторов, а также применения подхода ленивых вычислений в сочетании с фрагментной системой обсчёта.
Приложение
 |
 |
 |
| Скриншот viewport'а приложения с сгенерированным ландшафтом | Пример вычисляемой карты биомов | Пример вычисляемой карты высот |

Библиотека для управления мобильными роботами, на примере простейшего робота Linefollower
Автор: Белоусов Евгений Александрович
Гимназия 1576 ФМО, КСР МФТИ
Научный руководитель: Петренко Эдуард Оттович
Цель проекта
Актуальность проекта
Спортивная робототехника — быстроразвивающееся направление научно-технического молодежного творчества. Все больше и больше людей принимают участие в проектировании новых роботов и написании программ под них. Средний код для робота на платформе Arduino занимает 100 — 200 строк. А код для робота, который способен побеждать в соревнованиях может занимать до 2000 строк. Вероятность допущения ошибки в такой программе очень высока, а ее поиск крайне затруднителен. Не говоря уже о том, что это является недопустимым с точки зрения современного программирования. Написание библиотеки сильно упростит процесс написания и отладки программы, а код сократится до 20 строк.
Требования к простейшему Linefollower
Система должна обеспечивать автономное максимально быстрое следование по контрастной линии.
Анализ
Мобильный робот состоит из сенсоров, микроконтроллера и актуаторов — частей конвейера, слаженная работа которых обеспечивает правильное функционирование системы.
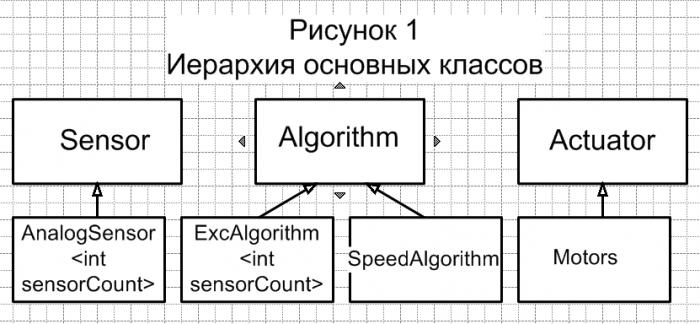
Для дальнейшей работы имеет смысл выделить три основных вида классов нашей программы: Sensor, Algorithm и Actuator, которые являются частями конвейера.
Дальше мы можем выделить следующие основные классы для linefollower`а: AnalogSensor, ExcAlgorithm, SpeedAlgorithm, Motors. Пронаблюдать иерархии объектов робота мы можем пронаблюдать на рисунке №1.
Проектирование
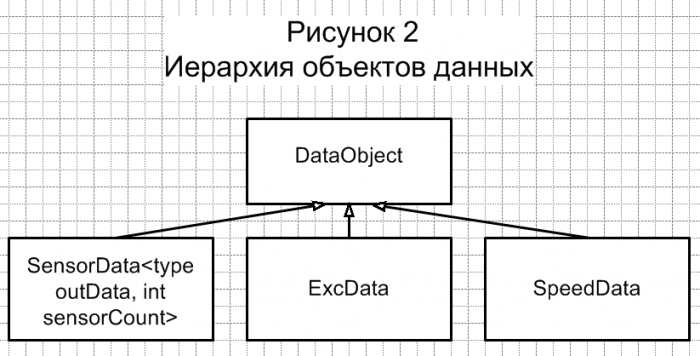
Для обеспечение гибкости программы был выбран вариант создания объектов данных, с которыми будут взаимодействовать основные классы нашей программы.
Иерархию классов объектов данных можно пронаблюдать на рисунке 2.
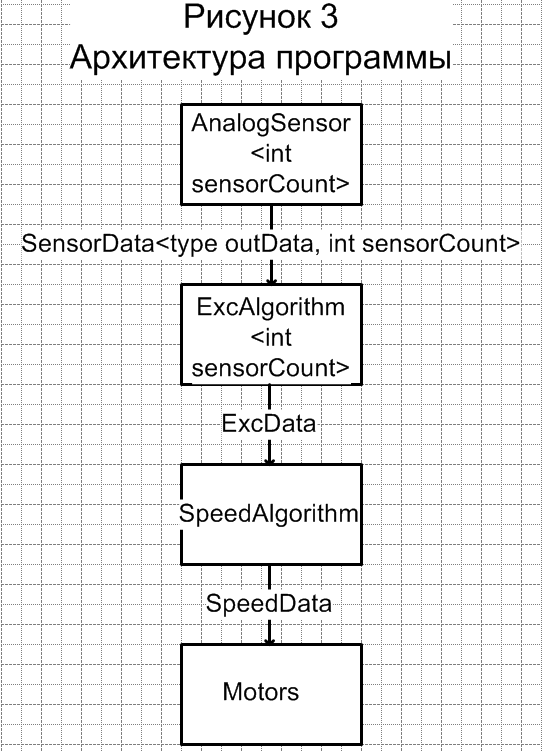
Архитектура, построенная нами, представлена на рисунке 3.
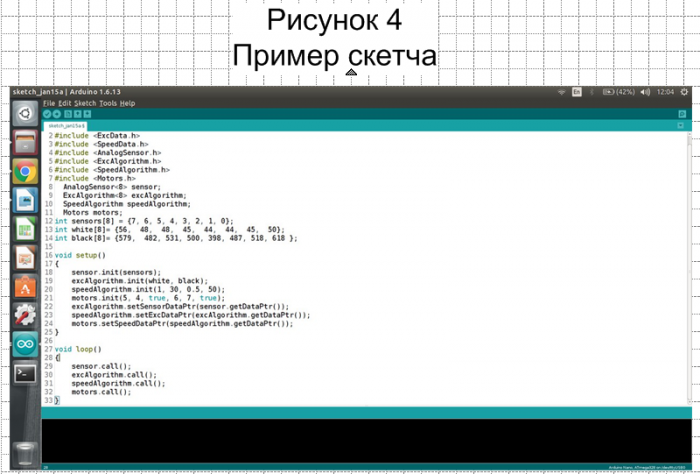
Пример работающей программы можно пронаблюдать на рисунке 4.
Готовый код выставлен на github.
Результаты проекта
Создана легко-расширяемая библиотека для управления мобильным роботом, использование которой
Существенно улучшена программа на роботе «Angel-1»
Создано ПО для нового робота «Light»
В работе представлена программа 3Ds-Geometry, написанная на языке Python-3.3. С помощью программы можно строить 3Ds-изображения (стереоскопические) геометрических конструкций с использованием разработанного нами входного языка LSDSS - языка изучения и разработки стереоскопических конструкций

В Европе и мире, где уже развит рынок умных домов, остро стоит проблема взломов и атак на эти самые дома. В связи с популяризацией умных домов в России, ожидаемо, что возникнет похожая проблема. Для решения этой проблемы за рубежом разрабатываются стандарты безопасного взаимодействия. Аналогичные действия необходимы и в рамках российского рынка.
Нами были использованы следующие аппаратные платформы: Raspberry Pi 3, Arduino, NodeMCU Devkit v1.0. Также нами использованы следующие технологии: HTTPS, AES256, SHA384. Использованное ПО: Arduino IDE, Django, Nginx, gunicorn, SQLite 3, Java SE, Android studio, Google Speech API, JQuery, Bootstrap.
В итоге работы над проектом была разработана архитектура безопасной работы «умного дома» и защищенной передачи данных между сервером и периферийных устройств. Также был собран прототип, показывающий работоспособность нашей архитектуры. Созданы: центральный сервер, мобильное приложение с голосовым управлением, а также несколько Умных устройств.
Наш прототип доказал работоспособность нашей системы. В дальнейшем мы планируем провести полномасштабное тестирование на базе реального дома и проверить все компоненты системы.
Создание универсальной системы для работы с тестами Ease
Свистунов Роман Олегович (Беларусь, Минск, Гимназиия 13, 8)
Научный руководитель: Гурьянова Татьяна Владимировна, преподаватель информатики “Юни-центр XXI” ФПМИ БГУ
Я решил создать систему для работы с тестами, которая бы удовлетворяла самым капризным требованиям в плане функциональности, надёжности, простоте освоения и использования, кроссплатформенности и проч., позволила бы перейти на новый уровень в уже имеющемся автоматизированном тестировании в дистанционном обучения и проведении олимпиад.
Для создания системы, как для клиентской, так и для серверной части использовался язык программирования C#. Для надёжности канала связи применялось RSA шифрование. Для исключения возможности получения ответов во время выполнения заданий использовалась блокировка всех интернет соединений аккаунта. В браузерной версии для хранения данных используется БД MySQL.
Сервер обеспечивает получение тестов пользователями. Каждый тест - это файл в формате .testarray, который является объединением нескольких .xaml и .data файлов – файлов разметки и дополнительной информации, а также фала .tdata с общей информацией о тесте. Клиентское приложение разделяет получаемый .testarray файл на составные части. Каждая страница теста – отдельный .xaml файл, который загружается при необходимости. В файлах .data хранится информация. Тесты создаются пользователями в графическом интерфейсе. После сохранения теста системой создаётся промежуточный файл в формате .blacktest. Черновик с данными отправляется на сервер и попадает в очередь для разбора. Система преобразует файл в файлы .testarray для пользователя и .testchk для проверки. Эти файлы хранятся в специальной директории теста, в которую позже попадает таблица результатов, статистика или ответы пользователей в зависимости от желания автора. На данный момент существует только браузерная версия, работающая только с тестами, у которых `security`=”none”. Эта версия функционально пока очень похожа на ту, которую мы используем в нашей группе в ВК https://vk.com/computersciencescollege (https://vk.com/app5671337_-86363774). Для реализации системы мы начали наполнять сайт, на котором планируется проводить психологические исследования: csc.minsk.by/example. Мы первоначально сделали его на cms WordPress.
Планируется опробирование тестирующей системы на вышеуказанном сайте, планируем переписать его на C#, а также создать портал дистанционного обучения,...
Беспроводная зарядная станция
Трубачев Илья Игоревич (Красноярский край, г. Красноярск, МБОУ СШ №34, 10 класс)
Руководитель: Кольга Вадим Валентинович, доктор педагогических наук, кандидат технических наук, профессор кафедры летательных аппаратов СибГАУ им. М.Ф. Решетнева, проректор КГПУ им В. П. Астафьева
В нынешнее время развит только один способ беспроводной передачи электричества (индукционный метод, стандарт QI), который все-таки требует непосредственного контакта зарядной станции и мобильного устройства, т.к. использует ближнее электромагнитное поле. Что не делает этот способ по-настоящему дистанционным. Цель работы: разработать и создать беспроводную зарядную станцию для маломощных потребителей электрической энергии, а также специальное приемное устройство. Стоит отметить, что такие университеты и корпорации, как Intel (проект WREL), MIT (проект WITricity), Лондонский имперский колледж, ИТМО и «НИИ Гириконд» и др. активно работают в данной отрасли.
Данная проблема решается тем, что используется переменное высокочастотное электромагнитное поле, создаваемое передающим устройством (блокинг-генератор, переделанная SSTC Tesla), которое "улавливается" приемным устройством. Приемное устройство на своей стороне включает в себя колебательный контур с подстроечным конденсатором (для создания резонанса с передающей катушкой), выпрямительные диоды, а также импульсный стабилизатор напряжения с выходным напряжением 5V.
В результате проделанной работы:
• Проведены расчеты, разработана принципиальная электрическая схема устройства, собран функционирующий прототип на основе блокинг-генератора.
• Проведено исследование зависимости напряжения от расстояния при беспроводной передаче электричества с использованием блокинг-генератора на биполярном транзисторе.
• Разработана специальная схема приемного устройства зарядной станции и с помощью нее на расстояние около 1 метра запитана самодельная светодиодная гирлянда (12 светодиодов, управляемые микроконтроллером Attiny 2313).
• Ведется патентование полезной модели «Беспроводная зарядная станция».
Финальную версию устройства можно применять как для подзарядки мобильных устройств на расстояние от зарядной станции, так и для питание маломощным бытовых устройств в комнате (например, осветительная техника). Также с помощью подобного устройства можно питать электромобили прямо во время движения по специальной дороге или подзаряжать квадрокоптеры во время полета.
Литература:
1. Хоровиц П., Хилл У. Искусство схемотехники: учеб. пособие / Хоровиц П., Хилл У.; пер. с англ. Б. Н. Бронина, А. И. Коротова, М. Н. Микшиса, Л В. Поспелова, О. А. Соболевой, Ю. В. Чечёткина – М.: БИНОМ, 2014. - 704 с.
2. Патент №2510558 РФ, МПК H02J17/00 H04B1/38 B60L9/08. Беспроводная зарядная система для маломощных потребителей электрической энергии / Д.С. Лопатин, Д.Н. Кушнерев, А.В. таманов – (РФ) - №2012130868/07; Заявл. 19.07.2012; Опубл. 27.03.2014. – (http://www1.fips.ru/wps/portal/IPS_Ru)
3. Энциклопедия русской мысли, Т. 16, доклады русскому физическому обществу: Сборник научных работ, ч. 3 / Власов, В.Н. Вилка Авраменко или зачем передавать дармовую энергию на расстояние – Москва: Общественная польза, 2012
4. Исаев Г.П. Электродинамика: учеб. Пособие / Г.П. Исаева; Камчатский государственный технический университет. - Петропавловск-Камчатский: 2006. – 150с.
5. Калантаров П.А., Цейтлин Л.А. Рассчет индуктивностей: справочное руководство / Калантаров П.А., Цейтлин Л.А. –Ленинград: ЭНЕРГОАТОМИЗДАТ Ленинградское отделение,1986. – 488 с.

Исследовательский проект:"Магнитно-импульсная дорога"
Ичёткин Дмитрий Владимирович
МБОУ СОШ №17 г.Твери
Научный руководитель: Митрофанов Анатолий Иванович
Педагог доп.образования МБОУ СОШ №17
Цель: разработать и изготовить макет действующей магнитно-импульсной дороги, которая должна быть безопасной, экологически чистой, скоростной и экономичной в силу минимального потребления электроэнергии по сравнению с известными транспортными средствами на магнитной подушке;
Описание научно-исследовательской работы:
В научной работе описывается разработка нового типа транспорта:магнитно импульсной дороги и изготовление его макета.
Актуальность и новизна изобретения состоят в следующем:
Итоги исследование:
В результате проделанной работы поставленные перед нами цели были достигнуты, а задачи полностью решены. Для того чтобы транспорт удовлетворял всем предъявляемым к нему требованиям, он должен быть
Литература:

Робототехника в современном мире развивается и удивляет новыми решениями. Особую роль играют модели роботов, которые заменяют какую-либо деятельность человека. Робот-техник, разработанный на платформе Arduino, автоматизирует работу в ряде технологических процессов, в ходе которых необходимо осуществлять измерение температуры и расстояния до объекта. Например: для нестационарных, перемещающихся объектов (т.е. установка стационарных датчиков температуры невозможна или экономически не выгодна); объектов, агрегатное состояние которых меняется; объектов, доступ к которым затруднен или невозможен для человека.
Описание и видеоролик робота-техника по ссылке:https://youtu.be/6euBss_YQuQ


В последнее время IT индустрия шагнула далеко вперед. То что раньше казалось сказакой - ныне реальность. Смартфоны, планшеты, компьютры, ноутбуки и прочая техника есть почти у каждого жителя земли. Но при пользовании различного рода устройств появляются много неудобств. Одна из них - различные ОС и набор программ на разных устройствах.
Наш проект - SimplyOS, направлен на создание кроссплатформенной Операционной Систмы для облегчения пользования различными устройствами.
Единая ОС на всех видах устройствах - это единый набор программ и функций. Никаких системных различий, только разный внешний вид.

1. Тема научной работы: «Изготовление электромузыкальн
2. Работу выполнил: Яковлев Ярослав Геннадьевич, ученик 8-го класса
3. Образовательное учреждение: БОУ г. Омска «Гимназия №19»
4. Руководитель: учитель физики Курцаева Елена Александровна. Научный руководитель: руководитель секции «Радиотехника» клуба юного техника «Приборист» Поляков Юрий Федорович.
5. Цель исследования: изготовить электромузыкальн
Задачи исследования:
1. Проанализировать литературу по истории создания и видам терменвокса.
2. Найти электрическую схему для сборки прибора.
3. Собрать терменвокс согласно предложенной схеме, при необходимости доработав ее.
4. Научиться играть на этом инструменте.
5. Опробовать терменвокс при создании музыки и в работе звукорежиссера.
6. Основной текст тезисов.
Терменвокс представляет собой прибор, который управляется без каких-либо механических воздействий. Чтобы управлять им, не нужно прилагать никакого воздействия: не требуется давить на клавиши или перебирать струны. Достаточно просто водить руками вокруг антенны, и звук появляется прямо из воздуха. Создал инструмент советский ученый Лев Термен, который научился играть на нем большие произведения. В настоящее время существуют целые группы музыкантов, играющие на терменвоксе. Некоторые, довольно известные, музыкальные дорожки написаны именно с его помощью, например, основная тема в фильме «Человек-амфибия
Я очень заинтересовался, где можно купить терменвокс. Оказалось, что средняя цена инструменты около 25 тысяч рублей, а собирается он только под заказ. Я решил сделать этот музыкальный инструмент своими руками.
Для того, чтобы сделать терменвокс, я решил воспользоваться схемой из журнала «Юный техник» (см. Приложение 1, рис. 1). В процессе пайки и сборки выяснилось, что в ней не хватает схемы УНЧ (усилителя низкой частоты), а также используются детали, которые достать в современном мире уже невозможно. В связи с тем, что в исходной схеме терменвокса предполагались старые транзисторы, которых нет в продаже, пришлось также переделывать исходную схему под новые реальности. Также мы разработали и добавили схему усилителя звука (Приложение 1, Рис. 2). УНЧ мы взяли из прибора «Раздан-205», выпаяв из производственной схемы ненужные детали. Пришлось также разработать схему стабилизатора напряжения (см. Приложение 1, рис. 3), которую мы спаяли, чтобы терменвокс получал всегда 12В.
7. Актуальность исследования. Актуальность создания терменвокса очевидна. В современном мире все сильно усложнено и в тоже время упрощено для потребителя. Настоящая музыка и музыканты как правило замещаются пустышками, которые едва научились открывать рот. А красивая, качественно исполненная музыка подменяется синтезатором, который не дает такой глубины.
8. Значимость и новизна исследования. В своей работе я разработал схему функционирующего электромузыкальн
9. Итоги исследования. В своей работе я ставил несколько гипотез, которые подтвердились либо полностью, либо частично. Мы действительно смогли сделать терменвокс своими руками, хотя встретили на своем пути некоторые трудности.
Цена прибора составила для нас всего 50 рублей в связи с тем, что практически все детали были выпаяны из старых или неработающих приборов. Но даже если покупать запчасти, стоимость не будет превышать 500 рублей, что в десятки раз дешевле и безопаснее, чем покупать уже готовый инструмент.
Обучиться игре на терменвоксе действительно можно, но это очень сложно. Нужно иметь твердые, спокойные, не дрожащие руки и тонкий слух, так как на терменвоксе ноты нигде и ничем не обозначены. Так что в этом наша гипотеза подтвердилась лишь частично – далеко не каждый человек сможет извлечь из этого инструмента внятную, хорошую мелодию (см. Приложение 2, аудио_3).
В работе звукорежиссера возможно использовать терменвокс. Это будет интересно украшать мелодию, подчеркивать ее (см. Приложение 2, аудио_4).
В дальнейшем нам хотелось бы доработать наш терменвокс. Для этого нужно увеличить уровень громкости инструмента.
Также я хотел бы научиться профессионально играть на этом удивительном музыкальном инструменте, а также использовать его для создания новых звуков.
http://jmj.com.u
Журнал «Юный техник» №10, 1975г., стр. 72-74.


ЧАСТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ДОПОЛНИТЕЛЬНОГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ "1С-ОБРАЗОВАНИЕ"
г. Москва
ПРОГРАММА ДЛЯ ЗАЩИТЫ ИНФОРМАЦИИ
CSSDATA
Автор: Большим Максим Антонович
Ученик 10 «Б» класса МБОУ СОШ № 30 г. Подольска
Научный руководитель: Чемисов Сергей Андреевич
Преподаватель ЧОУ ДПО "1С-ОБРАЗОВАНИЕ"
Создать программу, защищающую информацию (текстовые документы, медиафайлы, приложения и т.д.) от несанкционированного доступа с помощью применения методов криптографии и стеганографии.
Сделать программу доступной для работы неопытным пользователям и пригодной для работы специалистам в области защиты информации.
Предоставить пользователям инструмент для обеспечения безопасности важных для него данных.
С развитием информационных технологий, всё большую актуальность приобретает понятие защиты информации от несанкционированного доступа. Постоянная слежка и новости о взломах различных систем вынуждают задуматься о недоступности информации любого рода и характера для чужих лиц. Программа CSSData создана для решения этой проблемы.
CSSData- кроссплатформенная программа, созданная на языке Java.
Она представляет собой механизм, объединяющий воедино программы, реализующие методы криптографии стеганографии. При запуске пользователю доступен интуитивно понятный интерфейс, где он сразу может начать работу. В отличие от множества других программ и интернет сервисов программа предоставляет огромное кол-во настроек и методов защиты информации. В разделе криптографии пользователю предоставляется возможность выбрать известные алгоритмы шифрования(AES, BlowFish, DES, Triple DES, RC2, RC4, RSA), настроить длину ключа, IV вектор, режим шифрования, дополнения для блочного типа шифрования и, разумеется, пароль. В разделе стеганографии пользователю предоставляется скрыть два типа информации(файл, текст) в медиафайлах двумя способами: скрыть файл, предварительно зашифровав его; скрыть без шифрования. В конце каждой операции в программе предлагается отправить файл на email пользователя.
1) Изучить основы криптографии. Изучить понятия: симметричное, асимметричное, блочные и поточные алгоритмы шифрования; режимы блочного шифрования; хеширование.
2) Изучить основы стеганографии. Изучить LSB метод скрытия данных. Научиться манипулировать с информацией на битовом уровне.
3) Выбрать язык программирования и необходимые библиотеки для реализации проекта.
4) Реализовать механизмы работы стеганографии и криптографии в программе и связать их с удобным для восприятия интерфейсом.
1) Для разработки проекта выбран язык Java, из-за кроссплатформенности и наличия расширенного кол-ва требуемых библиотек;
2) Для работы с медиафайлами выбрана библиотека Xuggler из-за огромного функционала, большого кол-ва поддерживаемых кодеков и высокоуровневого API;
3) Для отправки сообщений на email выбрана библиотека Mail;
4) Для предотвращения запуска большого количества копий программы, во избежание замедления работы задействована библиотека JNA.
5) Для реализации методов криптографии я использовал встроенные инструменты шифрования Java из библиотеки JCE.
Как было сказанно выше, программа представляет собой механизм, объединяющий воедино программы, которые выполняют основные задачи.
Таких программ всего две: программа, реализующая методы криптографии; программа, реализующая методы стеганографии.
В свою очередь эти программы состоят из нескольких методов(алгоритмов):
Так же в программе существует два протокола шифрования файла: простое шифрование(подходит для взаимодействия с другими программами шифрования) и шифрование с преобразованием(подойдет только простым пользователям, но при этом несколько увеличивается криптостойкость шифруемого файла).
Шифрования с преобразованием было специально создано для простых пользователей. Суть в том, что при дешифровании в программе пользователю достаточно знать алгоритм шифрования, длину ключа, пароль и все. Остальные программы шифрования расшифровать файл этот не смогут. Взломщику будет гораздо сложнее расшифровать файл. Протокол простого шифрования альтернативен протоколу шифрования текста. Этот режим требует знание абсолютно всех настроек, что были введены при шифровании. При расшифровке текста так же нужно знать все настройки. Чтобы пользователь мог не беспокоиться о том, что он может забыть эти настройки, после совершения операции предлагается сохранить параметры шифрования на компьютере и отправить их потом на email пользователя.
Блок-схемы криптографических протоколов находятся в прикрепленном тезисе.
В программе стеганографии я реализовывал LSB метод(замена последних значащих битов в контейнере на биты скрываемого сообщения) для изображений и аудио. Поддержка LSB стеганографии видеофайлов будет добавлена в следующих версиях программы.
В интернете не существует программы, выполняющей такой широкий спектр действий для защиты информации. Отдельно существующие сервисы шифрования не предоставляют детальных настроек шифрования и не способны справляться с большими файлами быстро, а сервисы стеганографии иногда не могут должным образом скрыть информацию или извлечь её. Новизна CSSData заключается в том, что:
1) Она быстро и надежно шифрует и скрывает информацию;
2) Не ограничена объёмами обрабатываемой информации;
3) Доступна в работе как специалистам, так и неопытным пользователям.
В ближайшем будущем предполагается сделать WEB версию CSSData, что должно сделать программу доступной всем и одной из самых лучших в рунете. Так же планируется добавление новых возможностей, криптографических алгоритмов, видео-стеганографию, исправление ошибок. Пользователь с помощью данной программы может защитить любую информацию. Примером может стать:
1) Информация, связанная с денежными средствами;
2) Личные данные;
3) Секретная для посторонних лиц информация.
Изучены основы областей криптографии и стеганографии. Изучены принципы работ некоторых алгоритмов шифрования, строения аудио-файлов и изображений, законы логики для манипуляции битами. Проект успешно создан и в скором времени начнется разработка интернет-клона этой программы. Программа отлично справляется с шифрованием многогигабайтовых файлов и скрытием файлов в контейнере без повреждений.
К. Хорстманн «Java: Библиотека профессионала» 9-е издание, г. Москва, 2016 г.;
Г. Вадим «Цифровая стеганография», 2002 г.;
Citforum.ru – Режимы шифрования –
http://citforum.ru/security/cryptography/rejim_shifrov/ - [интернет-ресурс, дата последнего обращения – 17.12.2016 г.];
Java.com - Java Cryptography Architecture Sun Providers Documentation - https://docs.oracle.com/javase/8/docs/technotes/guides/security/SunProviders.html -
[интернет-ресурс, дата последнего обращения – 17.12.2016 г.];
Dreamincode.net – Steganography – http://www.dreamincode.net/forums/topic/27950-steganography/ - интернет-ресурс, дата последнего обращения – 15.10.2016 г.];
Javacodegeeks.com - Xuggler Tutorial: transcoding and media change - https://www.javacodegeeks.com/2011/02/xuggler-tutorial-transcoding-media.html - [интернет-ресурс, дата последнего обращения – 20.10.2016 г.];
Википедия – свободная энциклопедия - http://ru.wikipedia.org/ - [интернет-ресурс, дата последнего обращения – 21.12.2016 г.];
StackOverFlow – Форум программистов - http://stackoverflow.com - [интернет-ресурс, дата последнего обращения – 25.12.2016 г.];
CyberForum - Форум программистов и сисадминов - http://www.cyberforum.ru - [интернет-ресурс, дата последнего обращения – 21.11.2016 г.];
Xuggler.com – Xuggler documentation - http://www.xuggle.com/public/documentation/java/api/ - [интернет-ресурс, дата последнего обращения – 15.11.2016 г.];
Oracle.com - Java™ Platform, Standard Edition 8 API Specification - http://docs.oracle.com/javase/8/docs/api/ - [интернет-ресурс, дата последнего обращения – 16.12.2016 г.].
Принев Мечислав Александрович
МБОУ «Лицей №15», г. Воронеж
Научный руководитель: Старикова Наталия Петровна, учитель информатики высшей категории МБОУ «Лицей №15», г. Воронеж
В настоящее время все более востребованными становятся программные продукты с использованием компьютерного зрения [1] (определение лиц на фотографиях, управление компьютером при помощи жестов, распознавание объектов на изображении, датчики движения, системы технического зрения и т д), а также все большую популярность приобретает использование интерактивных поверхностей (сенсорные экраны, панели, школьные доски и т д).
Основной целью представляемого проекта является создание программного обеспечения SmartWall, позволяющего использовать компьютерное зрение для применения любой поверхности в качестве интерактивного элемента без использования сенсорных технологий.
Внедрение подобного ПО является очень актуальным, так как это позволит значительно снизить себестоимость интерактивных устройств за счет отказа от использования дорогостоящих сенсорных поверхностей.
ПО SmartWall может найти свое применение во многих сферах, например, для различных систем интеркомов и тревожных кнопок, в качестве одноразовых стерильных гаджетов при использовании в зараженных средах, в медицине в открытом космосе, в качестве части оборудования в военном обмундировании «Ратник», использование технологии для системы «умный дом», а также для создания интерактивных витрин в магазинах и торговых центрах без использования сенсорных поверхностей. Особую важность имеет предлагаемое ПО для использования в центрах реабилитации детей-инвалидов, в том числе как часть оборудования сенсорной комнаты, а также в образовательных учреждениях как альтернатива сенсорным доскам.
При решении задач, связанных с использованием компьютерного зрения, немаловажным является вопрос выбора метода сегментации изображения. ПО SmartWall создано на основе разработанного мною метода сегментации зашумленных изображений с плавающим порогом бинаризации [1, 2], сущность которого заключается в увеличении погрешности проверяемых условий на основе библиотеки AForge.NET [2] и автоматическом изменении порога бинаризации изображения, до тех пор, пока порог не будет позволять автоматически сегментировать нужное изображение. ПО SmartWall создано на языке программирования C# [3, 4, 5] в среде Visual Studio 2013, для корректной работы программы необходима версия .NET Framework 4.5. Для использования программы необходим компьютер ОС Windows и обыкновенная веб-камера.
Основным результатом работы является разработка ПО SmartWall, позволяющего использовать компьютерное зрение для применения любой поверхности в качестве интерактивного элемента без использования сенсорных технологий. Научная новизна проекта заключается в создании при помощи предлагаемого ПО, в основе которого лежит разработанный автором метод, несенсорных интерактивных поверхностей. Практическое применение ПО SmartWall, как уже было сказано выше очень обширно.
Реализация проекта: в настоящее время мною создан развлекающий и развивающий контент, который был протестирован в КУ ВО «Воронежский центр реабилитации инвалидов», был проведен SmartWallBattle для ребят в пансионате для одаренных детей «Солнышко», а также на уроках физики в МБОУ «Лицей №15» г. Воронежа. На основе предлагаемого ПО создан неэлектронный гаджет, представляющий собой браслет из ткани, позволяющий людям с ослабленным зрением пользоваться программой Skype. В настоящее время ведется работа по подготовке к тестированию интерактивной несенсорной рекламы в Воронежском Институте Высоких Технологий, для чего была алгоритмически решена проблема случайных перекрытий при увеличении количества нарисованных кнопок.
В будущем планируется доработка программы с целью использования ее как части оборудования сенсорной комнаты для детей-инвалидов, а также для создания интерактивной не сенсорной витрины для магазинов.
Литература

Автор работы: Пилинко Никита Алексеевич
Государственное учреждение образования «Гимназия № 30 г. Минска имени Героя Советского Союза Б.С. Окрестина»
Научный руководитель: Леонец Сергей Святославович, учитель физики
Цель работы: Создание устройства отображения меняющегося свечения на светодиодной ленте в зависимости от ускорения с использованием микроконтроллера и датчика ускорений.
Задачи:
1) изучить применение программируемых микроконтроллеров для создания электротехнических приборов;
2) рассмотреть возможность обработки значений датчика ускорений (акселерометра) для последующего отображения на RGB светодиодной ленте эффекта торможения;
3) рассмотреть возможность программного управления цветовым отображением на RGB светодиодной ленте;
4) рассмотреть принцип работы и формат значений акселерометра;
5) компоновка элементов устройства и оценка эффективности работы светодиодной ленты при изменении скорости передвижения.
Актуальность: Наиболее частыми причинами ДТП с участием велосипедиста являются:
1)Пренебрежение светоотражателями и фонарями.
2)Ошибка водителей по расчёту скорости и тормозного пути велосипедиста.
3)Совершение велосипедистами непредсказуемых манёвров.
Разработанное мной устройство поможет велосипедистам обезопасить своё движение в условиях города.
Кроме электронного блока ARDUINO, в данном проекте также были использованы RGB светодиодная лента, со встроенным в каждый диод микроконтроллером, позволяющая светить любым цветом отдельно взятый светодиод, и датчик ускорений (акселерометр).
Для оценки работы RGB светодиодной ленты, её заметности с различных расстояний в разное время суток, я решил рассмотреть возможность применения спроектированного устройства для велосипедного шлема при передвижении в темное время суток с использованием компактного элемента питания.
Целью применения шлема является обеспечение безопасности при передвижении по проезжей части, где имеются неосвещенные участки дороги.
Методы исследования: изучение теоретической литературы, анализ и обобщение изученного материала, использование языка С/С++ для программирования устройств на микроконтроллерах, изучение и анализ показаний акселерометра во время торможения, проведение экспериментов для оценки работы светодиодной ленты, компоновка и монтаж элементов оборудования.
Результаты:
1) были изучены возможности применения микроконтроллеров для создания электротехнических приборов;
2) была рассмотрена возможность обработки значений датчика ускорений (акселерометра) для последующего отображения на RGB светодиодной ленте эффекта торможения;
4) была рассмотрена возможность программного управления цветовым свечением RGB светодиодной ленты;
5) была произведена компоновка элементов устройства и оценка эффективности работы RGB светодиодной ленты при изменении скорости передвижения.
Выводы:
В результате проведения исследований была определена возможность применения созданного оборудования на базе микроконтроллера на неосвещенных участках дорог и тротуарах с изменением цвета свечения светодиодной ленты в зависимости от ускорения, также было собрано устройство, позволяющее велосипедисту сигнализировать о своих манёврах.

19-ая международная конференция научно-технических работ школьников «Старт в Науку»
Название научно-исследовательской работы: Разработка метеозонда для определения скорости и направления воздушных потоков.
Автор работы: Молодецкая Екатерина, класс 8
Образовательное учреждение, в котором выполнена работа МБУ ДО «Барнаульская городская станция юных техников»
Научный руководитель: доцент, к.т.н. Афонин Вячеслав Сергеевич тел.89132255770 afonin@mail.altstu.ru
В настоящее время для исследования и измерения метеорологических параметров атмосферы применяются радиозонды, имеющие ряд недостатков – большая погрешность измерений, одноразовость применения, использование дополнительных средств контроля траектории метеозонда. В данной работе предлагается вариант реализации метиозонда, лишённого перечисленных недостатков и позволяющего расширить спектр измерений. В части реализации проекта разработан измеритель скорости ветра, проведены и записаны на видео его испытания в лабораторных условиях.
Актуальность данной темы обусловлена необходимостью модернизации устаревшего метеооборудования для оптимизации затрат на метеорологические исследования атмосферы. Применяемые радиозондами являются затратными, вследствии необходимости содержании газовых станций и невозможности возврата метеодатчиков. Снизить стоимость исследования можно за счет отказа от радиопередатчика при использования коптера, как транспорта для возврата метеооборудования.
Целью поставлено разработать метеозонд для определения скорости и направления воздушных потоков. В соответствии с поставленной целью решены следующие задачи: проведен анализ современных устройств контроля параметров атмосферы; изучены основные типы электронных устройств для создания метеозонда и определены их особенности; рассмотрены основные принципы получения информации об атмосферных явлениях с помощью метеооборудования.
При выполнении работы были использованы методы исследования, такие как анализ и синтез, наблюдение, сравнение, моделирование, научный эксперимент. Метеозонд фиксирует параметры температуры, давления, направление и интенсивность воздушных потоков, местоположение. Особенностью разработки на данном этапе исследования является применение ветрогенератора для определения силы ветра. Разрабатываемый метеозонд непрерывно измеряет скорость ветра, ведет базу данных измерений.
Решение состоит в оснастке коптера электронным оборудованием для измерения скорости ветра. Измеритель скорости включает включающий в себя ветрогенератор, АЦП, микроконтроллер и жидкокристаллический дисплей. Ветрогенератор образует электрическое напряжение при кручении лопастей. АЦП преобразует аналоговое напряжение в двоичный цифровой код. Микроконтроллер преобразует цифровой код с АЦП с помощью калибровочных данных в единицы измерения скорости (м/с). В качестве индикатора используется ЖК дисплей. Микроконтроллер производит опрос всех датчиков с требуемой частотой и ведет запись в журнал измерений.
Предусмотрены этапы реализации проекта:
1. Изучение вопроса, формирование идеи, создание макета действующей метеостанции.
2. Проведение расчетов, подбор оборудования, консультации с метеоцентром. Тестирование оборудование.
3. Этап отладки оборудования для применения. Работа на метеоцентре с аппаратурой и оборудованием.
Разработанный метеозонд необходим метеослужбам для информирования МЧС, населения, «зелёной» энергетике в расчетах оптимального места для ветрогенераторных ферм. Инженерная метеорология может уменьшить влияние климата при проектировании объектов с учётом данных о силе ветров, количестве осадков. Результатами от внедрения станут: модернизация метеорологического оборудования, проведение измерений в атмосфере непрерывно или с заданной частотой, повышение точности метеопрогнозов.
Итогом моей научно-исследовательской работы является создание действующего устройства для измерения скорости ветра, демонстрирующего работу метеостанции на установке ветрогенератора. Эксперементальной площадкой для работы оборудования предложена площадка МДЦ в Крыму, где школьники, наблюдая за процессом и производя измерения, смогут расширить знания и получить опыт в области возобновляемой энергетики и метеорологии. Ссылка на видео ВКонтакте (при регистрации). https://vk.com/videos338225294?section=album_9&z=video338225294_456239285%2Fpl_338338225_9
Список используемых источников
1.Петровский Ю.С. В помощь метеонаблюдателю-радисту.- М.:Воениздат,1962.–182 с.
2. Грустная история о жизни метеозондов [Электронный ресурс]// Режим доступа: http://www.4turista.ru/content/grustnayaistoriya-o-zhizni-meteozondov.
3. Евстифеев А.В. Микроконтроллеры AVR семейства Classic фирмы Atme:- Додэка, 288с.
Создание модели перспективной электроэнергетической компании на основе ДАП
Автор: Чернов Валерий Андреевич
ГБОУ «Президентский ФМЛ No239», г. Санкт-Петербург Класс: 11
Руководитель: Мартемьянова Татьяна Юрьевна, к.п.н., учитель физики ГБОУ «Президентский ФМЛ No239»
Целью работы явилось создание модели перспективной энергетической компании на основе концепции децентрализованного автономного предприятия (далее – ДАП) с активным внедрением технологии «интернет вещей» и создание макета предприятия для данной компании, призванной показать возможный путь развития энергетики и устранении вышеописанных проблем.
В ходе работы над проектом мы поставили и решили следующие задачи:
Выбрать удобный защищённый способ для проведения транзакций
Разработать программное обеспечение для подключения сети ДАП
Спроектировать электронику базового блока управления для производителей электроэнергии
Основное содержание работы. Для работы с «умными контрактами» с возможностью
расчётов в криптовалюте, использован графический клиент среды Ethereum на компьютере с ОС Ubuntu и программные пакеты Geht и Mist. Описание необходимых параметров и функционала ДАП произведено через обращение к системному контракту BuilderDAO (‘DAO for power plants’ b ‘Power plants states’). Исходный код контракта «DAO for power plants» написан на языке JavaScript. Экономическая модель оптимизирует функцию дохода путём нахождения её экстремума численными методами. Модели деталей для действующего макета созданы в среде SolidWorks 2015 и напечатаны на 3D-принтере в ЦМИТ университета ИТМО. Для управления моделью электростанцией использован одноплатный компьютер Raspberry Pi 3, подключенный к сети Ethereum. Принципиальная электрическая схема электроники макета электростанции создана в среде Altium Designer 2015. Для получения и обработки событий на него установлены библиотеки geht и web3, работающие с сетью Ethereum. Мобильное приложение использует облачный сервис Parse, в котором хранится информация об идентификаторах каждой электростанции и выполняется программа синхронизации с сетью Ethereum в фоновом режиме.
Актуальность исследования. По данным Международного энергетического агентства за 2013 год в мире было произведено более 23 триллионов кВт·ч электроэнергии. В условиях быстро растущего уровня потребления электроэнергии дальнейшее расширение централизованных сетей приводит к возникновению ряда проблем, таких как снижение их отказоустойчивости, увеличение издержек на обслуживание, торможение развития энергетики в малонаселенных районах страны и отрасли в целом. Мы полагаем, что они могут быть решены с помощью увеличения уровня автономности всех частей энергетической компании. Децентрализованное автономное предприятие (ДАП) - это программно формализованное взаимодействие предприятия с юридическими лицами, многократно исполняемое и верифицируемое его узлами, представляющие собой отдельные производственные мощности и образующие децентрализованную информационную сеть.
Значимость и новизна исследования. Мы предложили современный способ решения современными аппаратными и программными средствами проблемы снижения нагрузки на сети ЛЭП, при котором также возможно увеличение прибыльности электроэнергитической компании за счёт её децентрализации. В отличие от существующих концепций, описанная в работе модель подразумевает децентрализацию энергетической компании.
Итоги исследования. Подготовлен проект децентрализованного автономного предприятия и изготовлен его действующий макет. Создано программное обеспечение, на базе которого было развернуто ДАП, описана его экономическая модель и спроектирована исполнительная электроника для рассматриваемого типа производства. Показано, как современные технологии (Интернет вещей, Индустрия 4.0 и пр.) позволяют уже сейчас сделать различные производства более эффективными, а жизнь людей более комфортной. Применение «Индустрии 4.0» расширяет возможности работы ДАП, в частности позволяет заключать умные контракты для выполнения разовых работ.
Мы продолжим работу над развитием и модернизацией проекта в будущем. В дальнейшем мы планируем усовершенствовать принципы покупки электроэнергии у ДАП и расширить возможности мобильного приложения.
Литература:
1. Физика. Электродинамика. 10-11 классы. Учебник для углубленного изучения физики. Мякишев Г.Я., Синяков А.З., Слободсков Б.А.; М.: Дрофа, 2005. - 480 с.
2. ОстроуховаН.Г. Совершенствование инструментов управления системой планово предупредительных ремонтов на предприятиях топливно-энергетического комплекса: монография / Н. Г. Остроухова. Самара: Самар. гос. техн. ун-т, 2013. - 120 с.
3. Мирошник И.В. Теория автоматического управления. Линейные системы – СПб.: Питер, 2005. – 336 с.: ил. – (Серия «Учебное пособие»).
4. ХорвицП., ХиллУ. Искусство схемотехники: Пер. с англ. – Изд.2-е. – М.:Издательство БИНОМ. – 2015. – 704 с., ил.
5. L. H. Tsoukalas and R. Gao, “From smart grids to an energy internet: Assumptions, architectures, and requirements,” in Proc. of Third Int’l. Conf. on Electric Utility Deregulation and Restructuring and Power Technologies, Nanjing, China, Apr. 2008.
6. Интернет-ресурс: https://www.gitbook.com/book/ensrationis/learning-center-airalab/details
Муниципальное учреждение дополнительного образования
Центр детского (юношеского) технического творчества
Исследовательская работа «Разработка социальной сети»
Выполнил Ларин Владимир Николаевич - ученик 9 класса
Руководитель проекта: Бояршинова Марина Владимировна - учитель информатики и робототехники МУ ДО ЦДТТ
Совсем недавно провести интернет домой было просто фантастикой. Некоторые организации не могли себе позволить эту роскошь. Старшее поколение помнит компьютерные клубы, где простые люди приходили поработать с Интернетом. Сейчас интернет вошёл в каждый дом, и даже самые маленькие дети могут работать с ним. Интернет используется для игр, поиска какой-либо информации, решения рабочих вопросов и общения с друзьями и родственниками. Общаться с людьми нам помогают социальные сети.
Первые социальные сети появились после крупного скачка интернет технологий. Но большую популярность они приобрели после создания американского сайта classmates.com в 1995 году. Этот проект оказался очень популярным, но настоящий бум социальных сетей начался в 2003 году, когда были созданы Facebook и LinkedIn.
Если LinkedIn была создана для установки деловых контактов, то Facebook старался удовлетворять потребности всех видов аудитории. Таким образом социальные сети стали площадкой, где пользователи рассказывают о своей личной жизни. Что же такое социальная сеть?
Социальная сеть – это интернет платформа, где можно публиковать какую-либо информацию из своей жизни или своё творчество. Основная её задача – помочь пользователю поделиться этим с друзьями или подписчиками. В нашей стране самыми популярными сетями являются Вконтакте, Одноклассники и Facebook.
Сегодня развитие социальных сетей приостановилось. По моему мнению это случилось из-за того, что 75% аудитории принадлежат компании Mail group – владельцу Вконтакте и Одноклассников. (АО "Тематическое медиа", 2017). Поэтому мною было принято решение разработать социальную сеть, которая была бы сильнее оптимизирована под пользователя.
Цель работы: разработать простую социальную сеть
Задачи:
Мое исследование является актуальным, так как основные принципы работы социальных сетей чётко не описаны и нет свободных примеров реализации.
Мой проект обладает и практической значимостью. Она заключается в том, что рынок социальных сетей временно приостановил своё развитие и, чтобы возобновить его, нужно сделать их более доступными для пользователей.
Работа рассматривает вопросы применения физических излучений для обеззараживания, каких либо объектов, в частности системного блока компьютера. В первой части работы рассматривается природа физических излучений и их воздействие на микроорганизмы. Следующие разделы посвящены изучению бактериальной среды персонального компьютера, и разработке системы бактерицидных излучателей, на основе физических излучений, в составе схемотехники персонального компьютера. Результатом работы явилось создание системы излучателей позволяющей эффективно производить обеззараживание системного блока компьютера. Эксперименты доказали, что система безопасна, как с точки зрения безопасности пользователей компьютером, так и с точки зрения безопасности для самого системного блока. Применение подобной системы излучателей может широко использоваться как в быту, так и в компьютерных классах школ, университетов, вычислительных центрах и других подобных заведениях.

Создание единой системы мониторинга ("Умной диспетчерской") - системы слежения за сигналами датчиков электронных систем "Умного города" на основе 3-d модели. Модель города разработана в MaxonCinema 4DStudioR16. Обработка сигналов реализована с помощью сети светодиодов, соединённых в электрическую сеть, проложенную через здания макета города. Для автоматизации модели использован Arduino MEGA 2560.
Подробно о ходе работы и результатах в приложенном файле.

Создание единой системы мониторинга ("Умной диспетчерской") - системы слежения за сигналами датчиков электронных систем "Умного города" на основе 3-d модели. Модель города разработана в MaxonCinema 4DStudioR16. Обработка сигналов реализована с помощью сети светодиодов, соединённых в электрическую сеть, проложенную через здания макета города. Для автоматизации модели использован Arduino MEGA 2560.
Подробно о ходе работы и результатах в приложенном файле.

В лабораторных исследованиях важно знать степень химической чистоты вещества. Однако не всегда возможно определить, содержатся ли в данной жидкости примеси, не прибегая к трудоемким исследованиям.
Работа нашего прибора основывается на измерении скорости звука, проходящего через данную жидкость на фиксированном расстоянии. В разных средах эти скорости могут значительно различаться, что и является основной идеей нашего проекта. Величина скорости звуковой волны подчиняется конкретному физическому механизму. Это служит одним из самых важных параметров при изучении различных сред, в нашем случае – жидкостей.
Высокая мобильность и низкая себестоимость являются далеко не единственными особенностями нашего прибора. Самая главная – отсутствие осциллографа как отдельной его части. Мы можем измерять скорость звука в среде (в нашем случае – жидкой), не прибегая к его помощи.
Сейчас люди уделяют большое внимание составу всего, с чем имеют дело, будь то еда, одежда, мебель и другие предметы быта. Человек хочет чувствовать себя уверенно, а потому тратит деньги на приборы вроде дозиметров и экотестеров для фруктов и овощей. Наш измеритель чистоты жидкости прост в использовании, а потому им может пользоваться каждый. Тем более, прибор можно использовать даже на кухне, определяя, например, чистоту питьевой воды.

«Домашняя метеостанция своими руками»
Машков Михаил, ученик 6Б класса
МАОУ Гимназия №115, г. Уфа
Цель работы – сделать своими руками метеостанцию для контроля температуры и влажности с сохранением часовых измерений в течение суток.
Для достижения цели необходимо выполнить следующие задачи:
В прошлом году у нас появился на лоджии ларь для картошки. Мама сказала, что для хранения зимой важно, чтобы она не замерзла и не высохла. Так зародилась идея сделать метеостанцию своими руками, используя полученные ранее знания на кружке робототехники. Для сборки нужны следующие: микроконтроллер, датчик температуры и влажности, ЖК дисплей, макетная плата, соединительные провода, кнопка.
После того, как всё было подключено, я приступил к написанию программы, которая позволяет просматривать данные с датчика за последние сутки. Алгоритм работы программы следующий.
Каждые 2 секунды происходит измерение влажности и температуры и вывод их на экран для наблюдения за текущими значениями. Каждый час происходит сохранение измерений в массив из 24 элементов. При нажатии кнопки на экран выводится: сколько часов назад были сделаны измерения и значения этих измерений.
Когда программа была написана, я загрузил ее в контроллер. Датчик установил датчик на лоджию, а метеостанцию разместил на подоконнике.
Актуальность состоит в обеспечении сохранности овощей зимой.
Использование микроконтроллера в качестве основы моей метеостанции позволило реализовать дополнительную интересную функцию: при нажатии на кнопку метеостанция показывает на экране результаты предыдущих измерений. Это выгодно отличат мою метеостанцию от обычных устройств измерения температуры и влажности.
Таким образом, мы получили прибор не только измеряющий температуру и влажность, но и позволяющий вести наблюдение изменения данных в течение суток.
Список использованной литературы.
2. http://wiki.amperka.ru/
|
Секция: Информатика |
|
«1С:Клуб программистов», ЧОУ ДПО 1С-Образование, г. Москва |
|
127473, г. Москва, а/я 112, Отдел организации обучения |
|
тел.: (495) 688-90-02; E-mail: teen@1c.ru |
Выполнил: Каплин Артем
|
Класс: 8 О, ГБОУ города Москвы «Школа с углубленным изучением иностранного языка № 1236» ШО им. С.В. Милашенкова |
|
Научный руководитель: Чемисов Сергей Цели и задачи: Цель работы - упрощение процесса изучения географии и закрепление полученных знаний. В проекте используется новый интерактивный способ изучения географических карт.
Задачи: · Создать удобный для пользователя интерфейс: ничего лишнего, всё самое главное. · Помочь ученикам в изучении предмета. · Узнать как работают языки программирования в web-разработке и научиться их объединять.
Актуальность: Было важно узнать, как учить географию проще и доступнее - самым лучшим был вариант онлайн-приложения (или так называемого web-приложения). Хотелось бы создать сайт, который следовал нормам нашего времени, был интерактивным, продуманным. Сайт должен помочь учителям с его помощью можно готовиться к самостоятельным работам, контрольным или для закрепления материала. География - это тот предмет, который можно учить различными способами: работа с картой, заучивание наизусть, интерактивное обучение. Для данного проекта был выбран способ интерактивного обучения. Благодаря языку HTML это получилось не только доступно, но и красиво.
Технологии: 1. Языки программирования: Html, CSS, JS, JQuery, свои классы CSS. 2. Алгоритм "случайности" - позволяет создавать случайный порядок карт. Он написан на JS, с элементами обращения к CSS и HTML. Т.е. он выбирает параметры и вид карты. При помощи математических вычислений цикл проходит по всем элементам массива и создаёт порядок (вот пример: 3 2 1 5...), этот порядок чисел не соответствует 1 2 3 4[1], дальше цифры преобразуются в карты. В карту с оболочкой поступает число, в массиве дизайна CSS файла на каждую оболочку задан конкретный параметр - фон, размер и пр. Далее карты сортируются по двум колодам - столицы и страны.
Результаты: Мною создан сайт для изучения географии при помощи случайного генерирования карт. Данный сайт является долгосрочным проектом с большими возможностями для доработки, развития и совершенствования.
Список использованной литературы: 1) HTMLBook [Электронный ресурс]: URL: https://htmlbook.ru/ 2) Сертифицированные методические материалы Фирмы 1С по курсу "Основы программирования на языке Java" 3) Сертифицированные методические материалы Фирмы 1С по курсу "Управление разработкой программных продуктов" 4) Learn javascript [Электронный ресурс]: URL: https://learn.javascript.ru/
|
|
|
[1] имеется ввиду: число идущее следующем не имеет вид (число предшествующее+1)
На сегодняшний день использование группы роботов с компьютерным зрением для решения сложных задач приобретает все большую актуальность. Это связано с тем, что группа роботов способна выполнять поставленные задачи самостоятельно, без внешних управляющих воздействий путем взаимодействия друг с другом и окружающей средой в разы быстрее и эффективнее по сравнению с единичным аппаратом.
В данной работе рассматриваются возможные способы распознавания обьектов для строительства обьектов группой роботов,ведется анализ и сравнение возможных алгоритмов ,их совмещение для получения наилучшего результата,тестирование алгоритмов с помощью испытательного стенда и манипулятора.

Данная работа рассматривает возможность создания и последующей интеграции информационно-образовательного ресурса в школьную программу (8-11 класс)
Идея нашего проекта очень актуальна так, как склады существовали и будут существовать всегда. Она не похожа на те методы, которые используют в современном мире. Уже существуют первые версии складских роботов погрузчиков, но сейчас все роботы погрузчики работают независимо друг от друга, а основная идея нашего проекта заключается в том, что все роботы будут работать под управлением одного главного компьютера, который будет синхронизировать и оптимизировать их работу. Мы получаем ограничение только в виде пространства склада. При работе роботов исключается человеческий фактор.
Актуальность проекта заключается в том, что склады существовали и будут существовать во все времена, но оставался открытым вопрос по их оптимизации, особенно это касается очень больших складов. Чтобы их работа не останавливалась и проходила гладко необходимо придерживаться определённого, заранее подготовленного, алгоритма. А лучше всего с такими вещами справляются роботы. Роботы могут во много раз ускорить работу складских помещений. Их не очень сложно обучить определённому алгоритму и их КПД в данной сфере выше, так как они могут хранить и быстро обрабатывать очень большие объёмы информации . У робота всегда есть преимущества перед человеком с точки зрения ошибок, они не подвержены человеческому фактору, выполняют свою работу быстрее, качественнее и точнее, а это означает, что грузы будут быстрее доставляться в пункт назначения и реже попадать не по адресу. К тому же работа на складах очень тяжела и монотонна для человека. Необходима хорошая физическая подготовка, что не является проблемой для робота.
Так же данные роботы могут помочь решать экологические , а так как человечество очень быстрыми темпами загрязняет окружающую среду, то этим вопросом необходимо заняться как можно быстрее.
Идея создания автоматизированного робота-погрузчика не очень нова. Уже существуют некоторые модели, которые уже успешно выполняют свою работу на складах, но основной и общей проблемой всех этих роботов является их стоимость. Например шведские погрузчики стоят 25-26 тысяч Евро. Но мы предлагаем сделать данную конструкцию более дешёвой, за счёт усовершенствования конструкции, но её недостатком является то, что её нельзя применять для транспортировки хрупких грузов, но она будет полезна , например, при применении погрузчика в качестве помощника при утилизации мусора.
Человечество очень сильно загрязняет окружающую среду. Образуется огромное количество свалок и необходимо весь этот мусор каким-то образом перерабатывать, для его переработки его необходимо куда-либо транспортировать, эту работу и могут выполнять автономные роботы-погрузчики. Похожая идея уже была рассмотрена в мультфильме «Валли», только там весь этот мусор перерабатывал сам робот. Так же существует множество мест, где работая человек может получить вред для здоровья. Места, где находятся в большое количестве отравляющие химические вещества или радиоактивые отходы. Ярким примером является предприятие Чернобыльская АЭС, авария на котором унесла жизни многих людей. Работая там человек получает огромную дозу радиации и непоправимый ущерб здоровью, что не страшно роботу. Так же роботы-погрузчики необходимы в портах или иных местах погрузки, где необходима очень быстро и точно погрузить грузы, ведь простои больших кораблей стоят очень больших денег. Ещё одним плюсом, упоминавшимся ранее, является способность погрузчиков управляться с грузами очень большой массы.
Для создания серийного производства роботов-погрузчиков необходимо для начала создать испытательный полигон и изучить, какие технологии наиболее рационально использовать для каждой задачи робота. Например, в зонах складов и портов не было бы больших проблем для создания каких-либо напольных разметок, позволяющим роботам ориентироваться в пространстве, что было бы затруднительно реализовать на поверхности земли, так как данные системы довольно уязвимы к многочисленным природным воздействия.
Вторым важным пунктом реализации является финансовая база. Ведь для создания крупного мероприятия и наладки серийного производства требуется начальное вложение.
Роботизация и автоматизация промышленных процессов имеют и оборотную сторону. Роботы будут лишать людей их рабочих мест. На диагностической игре, когда нам необходимо было спросить у людей их мнение о нашем проекте, я подтвердила эти догадки. Многие люди категорически против уступать свои рабочие места роботам. Некоторые готовы просто отдать им самую тяжёлую часть работы. Пока общество не готово к полной автоматизации
Актуальность вопроса переработки мусора заключается в том, что существующие в нашей стране методы утилизации отходов не эффективны, вредны и опасны, и главной причиной этого является отсутствие сортировки мусора в местах его накопления. С целью организации раздельного сбора отходов на первом уровне был создан автоматизированный комплекс. Установка с тремя видами датчиков, управляемая компьютерной программой, позволяет отсортировать 4 типа отходов: пластик, бумагу, стекло и металл, которые являются самыми распространёнными и долгоразлагаемыми. Использование их в качестве дешёвого вторсырья не только экономически выгодно, но и способствует решению проблемы экологического загрязнения планеты.
Актуальность вопроса переработки мусора заключается в том, что существующие в нашей стране методы утилизации отходов не эффективны, вредны и опасны, и главной причиной этого является отсутствие сортировки мусора в местах его накопления. С целью организации раздельного сбора отходов на первом уровне был создан автоматизированный комплекс. Установка с тремя видами датчиков, управляемая компьютерной программой, позволяет отсортировать 4 типа отходов: пластик, бумагу, стекло и металл, которые являются самыми распространёнными и долгоразлагаемыми. Использование их в качестве дешёвого вторсырья не только экономически выгодно, но и способствует решению проблемы экологического загрязнения планеты.
Идея данного проекта очень актуальна так, как склады существовали и будут существовать всегда. Она не похожа на те методы, которые используют в современном мире. Уже существуют первые версии складских роботов погрузчиков, но сейчас все роботы погрузчики работают независимо друг от друга, а основная идея нашего проекта заключается в том, что все роботы будут работать под управлением одного главного компьютера, который будет синхронизировать и оптимизировать их работу. Мы получаем ограничение только в виде пространства склада. При работе роботов исключается человеческий фактор.
Чтобы складских помещений работа не останавливалась и проходила гладко необходимо придерживаться определённого, заранее подготовленного, алгоритма. А лучше всего с такими вещами справляются роботы. Роботы могут во много раз ускорить работу. Их не очень сложно обучить определённому алгоритму и их КПД в данной сфере выше, так как они могут хранить и быстро обрабатывать очень большие объёмы информации . У робота всегда есть преимущества перед человеком с точки зрения ошибок, они не подвержены человеческому фактору, выполняют свою работу быстрее, качественнее и точнее, а это означает, что грузы будут быстрее доставляться в пункт назначения и реже попадать не по адресу. К тому же работа на складах очень тяжела и монотонна для человека. Необходима хорошая физическая подготовка, что не является проблемой для робота.
Так же данные роботы могут помочь решать экологические , а так как человечество очень быстрыми темпами загрязняет окружающую среду, то этим вопросом необходимо заняться как можно быстрее.
Главной идеей данного проекта является объединение всех погрузчиков под управление одного основного компьютера, что позволило бы ускорить их работу.
Идея создания автоматизированного робота-погрузчика не очень нова. Уже существуют некоторые модели, которые уже успешно выполняют свою работу на складах, но основной и общей проблемой всех этих роботов является их стоимость. Например шведские погрузчики стоят 25-26 тысяч Евро. Но мы предлагаем сделать данную конструкцию более дешёвой, за счёт усовершенствования конструкции, но её недостатком является то, что её нельзя применять для транспортировки хрупких грузов, но она будет полезна , например, при применении погрузчика в качестве помощника при утилизации мусора.
Человечество очень сильно загрязняет окружающую среду. Образуется огромное количество свалок и необходимо весь этот мусор каким-то образом перерабатывать, для его переработки его необходимо куда-либо транспортировать, эту работу и могут выполнять автономные роботы-погрузчики. Похожая идея уже была рассмотрена в мультфильме «Валли», только там весь этот мусор перерабатывал сам робот. Так же существует множество мест, где работая человек может получить вред для здоровья. Места, где находятся в большое количестве отравляющие химические вещества или радиоактивые отходы. Ярким примером является предприятие Чернобыльская АЭС, авария на котором унесла жизни многих людей. Работая там человек получает огромную дозу радиации и непоправимый ущерб здоровью, что не страшно роботу. Так же роботы-погрузчики необходимы в портах или иных местах погрузки, где необходима очень быстро и точно погрузить грузы, ведь простои больших кораблей стоят очень больших денег. Ещё одним плюсом, ранее упомянутым, является способность погрузчиков управляться с грузами очень большой массы.
Для создания серийного производства роботов-погрузчиков необходимо для начала создать испытательный полигон и изучить, какие технологии наиболее рационально использовать для каждой задачи робота. Например, в зонах складов и портов не было бы больших проблем для создания каких-либо напольных разметок, позволяющим роботам ориентироваться в пространстве, что было бы затруднительно реализовать на поверхности земли, так как данные системы довольно уязвимы к многочисленным природным воздействия.
Вторым важным пунктом реализации является финансовая база. Ведь для создания крупного мероприятия и наладки серийного производства требуется начальное вложение.
Но у этих таких роботов-погрузчиков есть и большой минус. Как и остальные роботы погрузчики отнимают у людей рабочие места.
Роботизация и автоматизация промышленных процессов имеют и оборотную сторону. Роботы будут лишать людей их рабочих мест. На диагностической игре, когда нам необходимо было спросить у людей их мнение о нашем проекте, я подтвердила эти догадки. Многие люди категорически против уступать свои рабочие места роботам. Некоторые готовы просто отдать им самую тяжёлую часть работы. Пока общество не готово к полной автоматизации.