Формат конкурса
Первый этап Конкурса будет проводиться 17 апреля 2016 года в 10:00 по московскому времени в НИТУ «МИСиС» в форме олимпиады по прикладной математике, информатике, физике и мехатронике (задачи на смежные дисциплины). По результатам отборочного этапа Конкурса определяются участники заключительного этапа Конкурса.
2 Математика + 2 Физика + 1 Информатика
(основной зачет)
+ 5 Междисциплинарных
Для прохождения на заключительный этап вам необходимо решить 4 задачи из основного зачета и одну междисциплинарную задачу.
Примеры задач с решениями
Математика №1, 11 класс
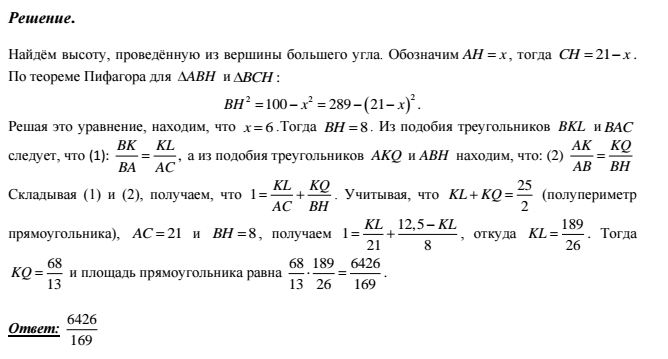
В треугольник со сторонами 10, 17 и 21 вписан прямоугольник так, что две его вершины лежат на большей стороне треугольника, а две другие – на меньших сторонах.
Найдите площадь прямоугольника, если его периметр равен 25.
Математика №2, 11 класс
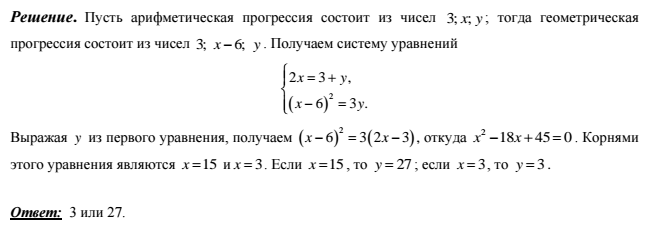
Между числом 3 и неизвестным числом вставлено ещё одно число так, что все три числа образуют арифметическую прогрессию. Если средний член этой прогрессии уменьшить на 6, то получитсягеометрическая прогрессия.
Найдите неизвестное число.
Физика №1, 11 класс
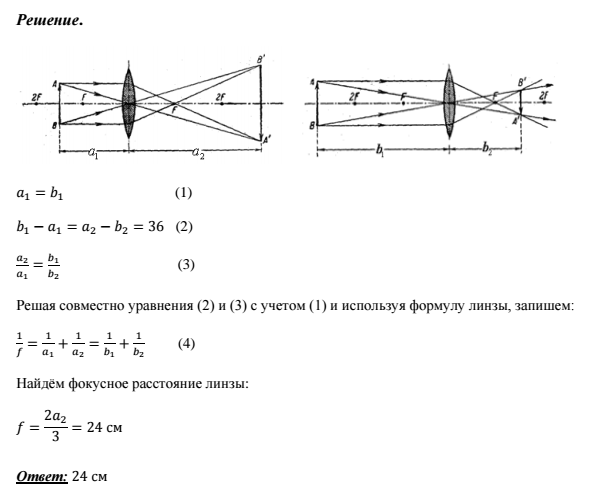
Собирающая линза даёт на экране изображение предмета, увеличенное в два раза.
Когда линзу приблизили к экрану на 36 см, то она дала изображение вдвое уменьшенное.
Найдите фокусное расстояние линзы.
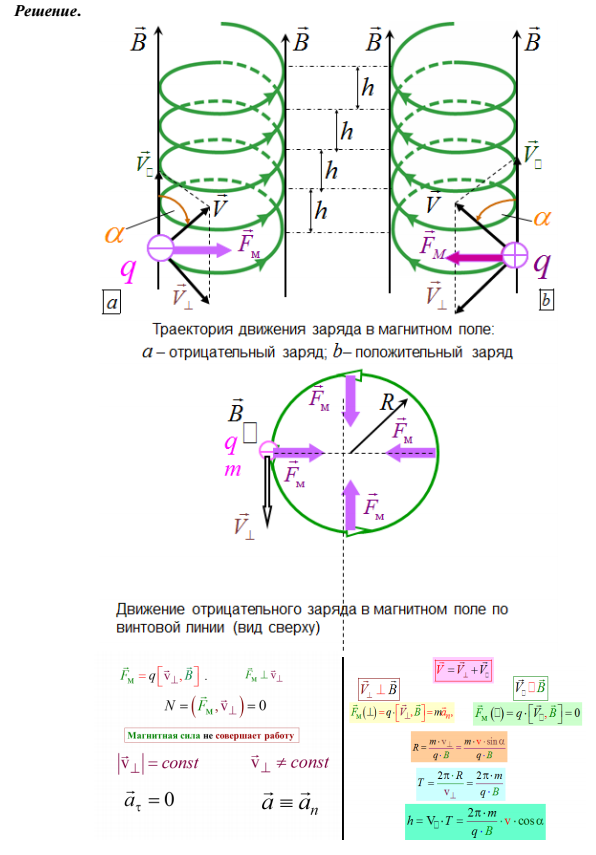
Физика №2, 11 класс
Электрон, имеющий скорость , влетает в однородное магнитное поле с индукцией под углом к вектору . Определите радиус и шаг винтовой линии, по которой будет двигаться электрон.
Информатика №1, 11 класс
Исполнитель Черепашка перемещается на экране компьютера, оставляя след в виде линии. В каждый конкретный момент известно положение исполнителя инаправление его движения. У исполнителя существуют две команды:
Команда1 x (x – число).
Команда2 m t (m – число, t – логическая переменная).
Запись Повтори k [Команда 1 Команда 2 … Команда q] означает, что последовательность q команд в скобках повторится k раз.
Программа
i=1 j=false Повтори 5 [ Команда2 i j Команда1 i i=i*1.5 j=not(j)]
Привела к появлению на экране следующей фигуры:
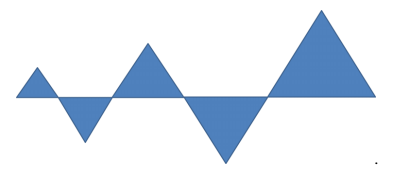
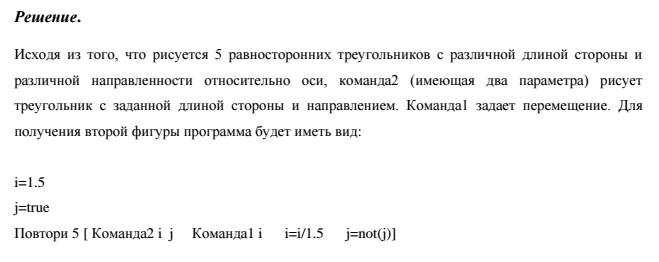
Определите, какое действие выполняет каждая команда. Какие параметры программы надо поменять, чтобы получить:
 ?
?
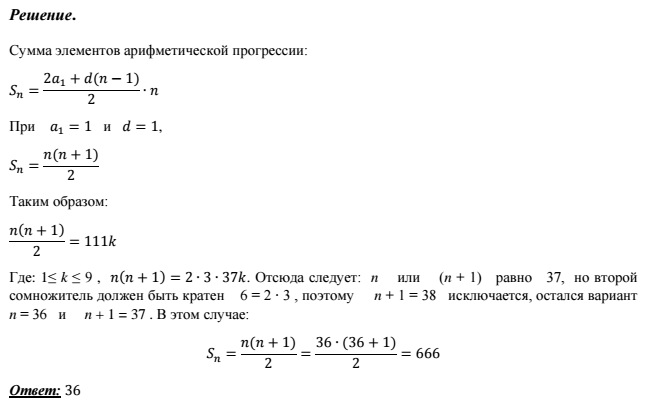
Математика №1, 10 класс
Сколько надо взять слагаемых суммы: , чтобы получить трехзначное число, состоящее из одинаковых цифр?
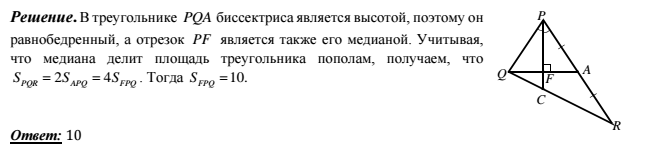
Математика №2, 10 класс
Биссектриса PC и медиана QA треугольника PQR взаимно перпендикулярны и пересекаются в точке F. Площадь треугольника PQR равна 40.
Найдите площадь треугольника FPQ.
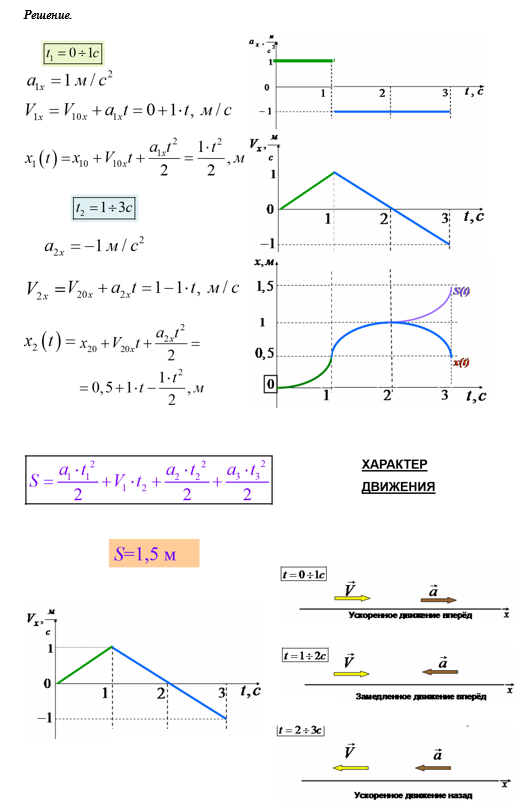
Физика №1, 10 класс
По графику зависимости постройте графики и , считая, что в начальный момент времени координата и скорость движения материальной точки равны нулю. Вычислите пройденный путь. Определите характер движения.

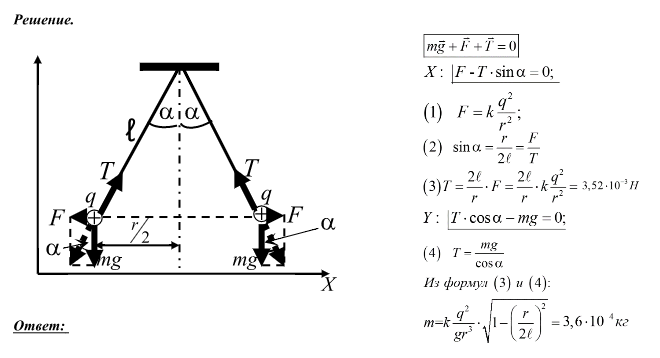
Физика №2, 10 класс
Два одинаковых шарика подвешены на нитях длиной к одной точке.
Когда шарикам сообщили одинаковые заряды по , они разошлись на расстояние .
Определите силу натяжения каждой нити и массу каждого шарика. Ускорение свободного падения .
Информатика №1, 10 класс
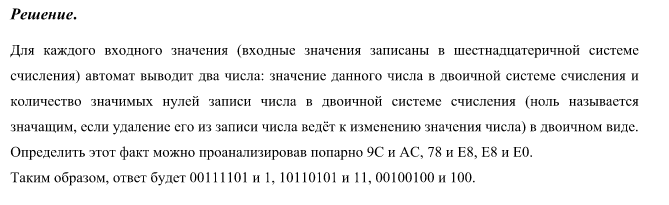
Автомат принимает на вход числа 1A, 9C, AC, 78, E8 и E0 и дает на выходе результат 00011010 и 10, 10011100 и 100, 10101100 и 100, 01111000 и 11, 11101000 и 100, 11100000 и 101.
Какие значения даст на выходе автомат, если на вход подать 3D, B5 и 24?
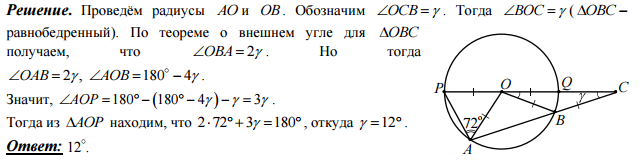
Математика №1, 9 класс
Через точку C, лежащую вне окружности с центром O, проведены две секущие к этой окружности. Одна из них пересекает окружность в точках A и B (B лежит между A и C), а вторая проходит через точку O и пересекает окружность в точках P и Q (Q между P и C). Найдитеугол ACP, если OAP равен , а отрезок BC равен радиусу окружности
Математика №2, 9 класс
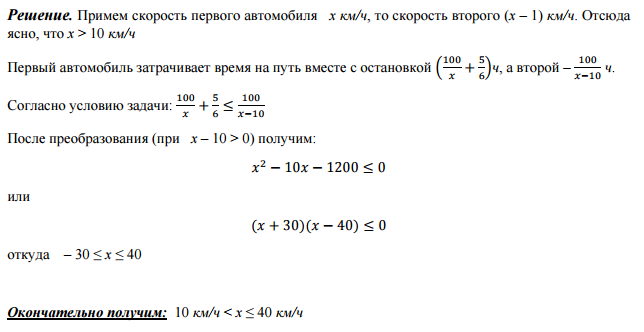
Расстояние между городами A и B равно 100 км. Из A в B одновременно отправляются два автомобиля. Первый имеет скорость на 10 км/ч большую, чем второй, и в пути делает остановку на 50 мин. В каких пределах может меняться скорость первого автомобиля при условии, что он прибывает в город B не позже второго автомобиля?
Физика №1, 9 класс
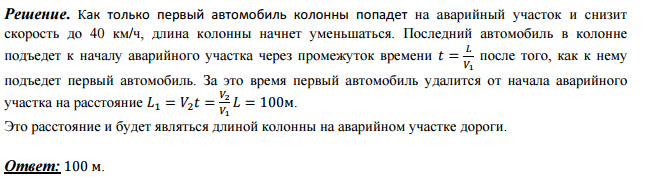
Колонна автомобилей движется по шоссе со скоростью . Длина колонны (расстояние по шоссе от первого автомобиля до последнего) составляет . По пути следования колонне встречается аварийный участок дороги, протяжённость которого значительно больше длины колонны. Попав на него, каждый автомобиль, поддерживая безопасный интервал, быстро снижает скорость до . Определите длину колонны на аварийном участке дороги.
Физика №2, 9 класс
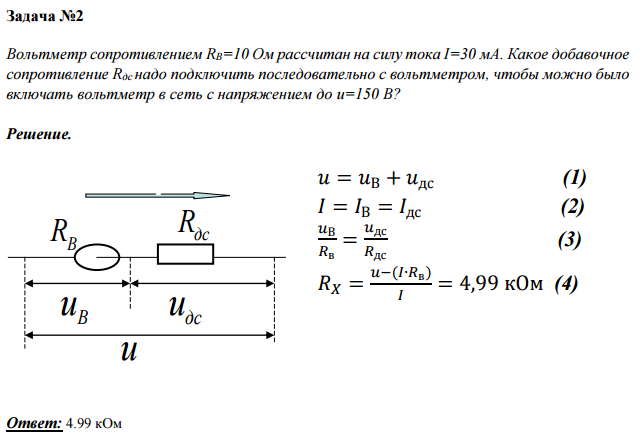
Вольтметр сопротивлением рассчитан на силу тока . Какое добавочное сопротивление надо подключить последовательно с вольтметром, чтобы можно было включать вольтметр в сеть с напряжением до ?
Информатика №1, 9 класс
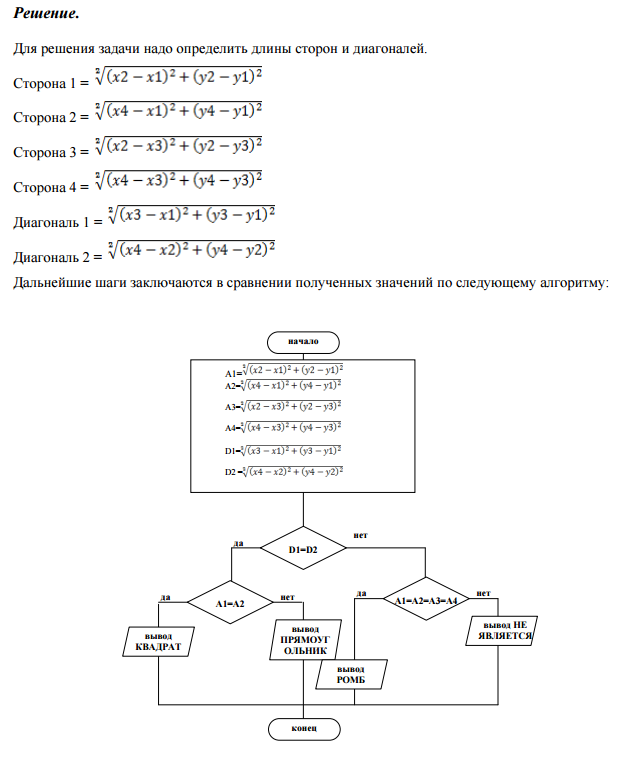
Написать программу на любом языке высокого уровня (или нарисовать алгоритм в виде блок-схемы) для определения по координатам четырех точек , , , , являются ли они вершинами квадрата? Ромба? Прямоугольника?
Междисциплинарные задачи
Информатика (программирование)
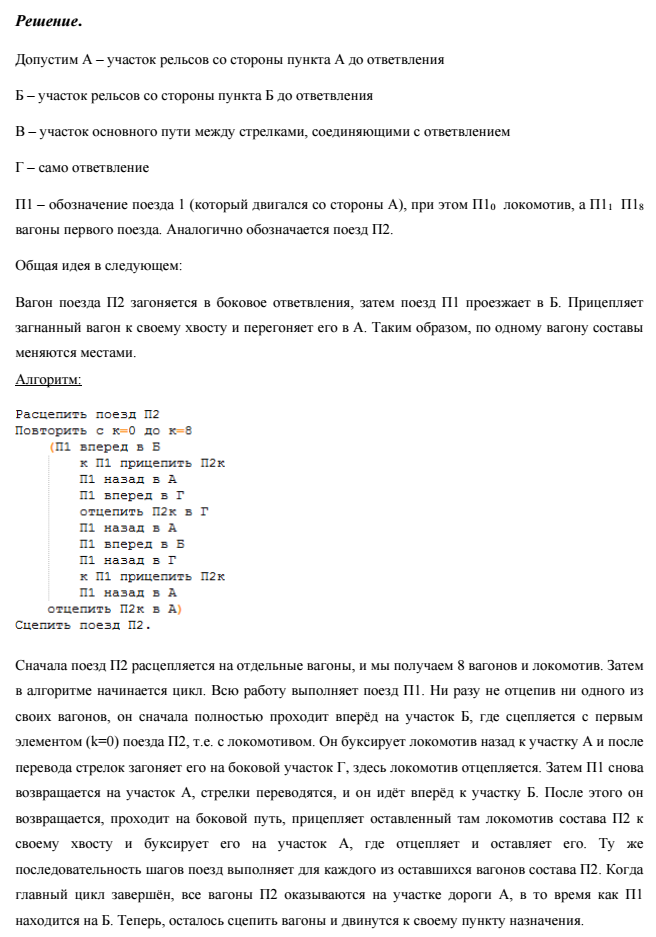
Один поезд из восьми вагонов движется из пункта А в пункт Б, а такой же второй едет ему на встречу из пункта Б в пункт А, по тому же пути. В некоторый момент они останавливаются друг перед другом. Между поездами лежит короткий отрезок железной дороги и маленькое боковое ответвление, длина которого позволяет разместить лишь один вагон или локомотив (на рисунке схематически изображены рельсы). Каждый вагон и каждый локомотив с обеих сторон имеют устройства сцепления.
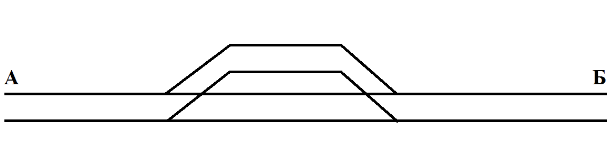
Необходимо написать алгоритм, после исполнения которого поезда смогут продолжить свой путь. Использовать команды вида: «вперед» «назад» «прицепить» «отцепить».
Прикладная математика
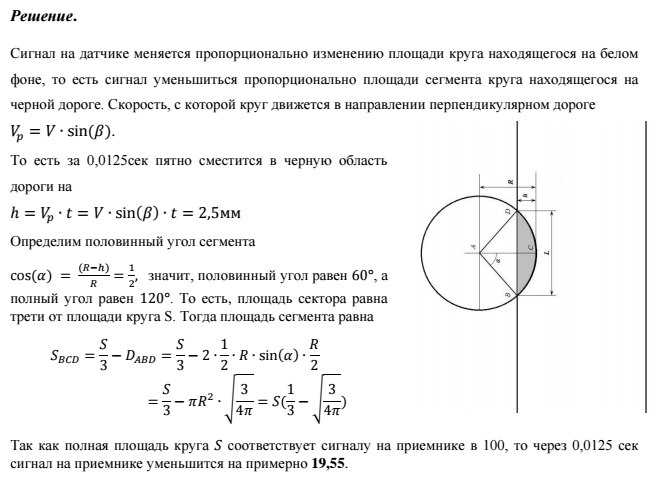
Робот участвует в соревнования «езда по линии». Цель соревнования, как можно быстрее проехать по черной дороге шириной нарисованной на белом поле. При этом для определения местоположения робота относительно дороги используется датчик, который состоит из излучателя и приемника. Излучатель подсвечивает область под роботом, а приемник улавливает отраженный сигнал. Допустим, излучатель создает на поверхности трассы равномерно засвеченный круг радиусом . Сигнал на приемнике линейно зависит от количества света отраженного от трасы. Когда круг находится на белом поле, на датчике сигнал , если же круг полностью попадает на черную линию, то на датчике сигнал становится равным нулю. В данный момент робот движется равномерно и прямолинейно со скорость , под углом к прямому участку трассы, при этом пока приемник выдает сигнал . Определить, изменение значения на датчике через , после момента, когда сигнал на датчике начнет меняться.
Прикладная физика
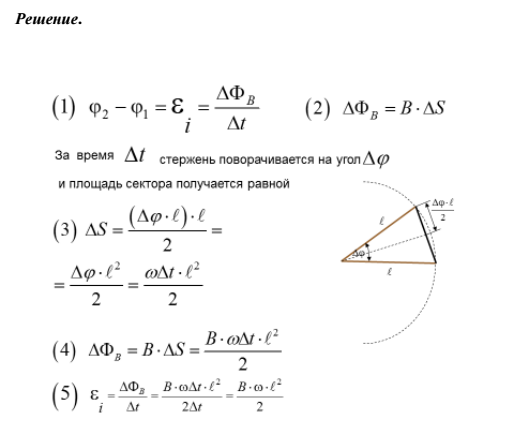
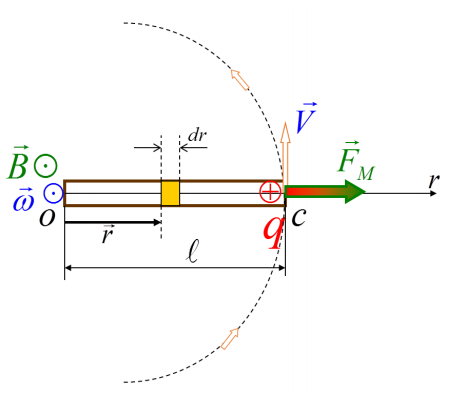
В однородном магнитном поле, индукция которого В, вращается стержень длиной с постоянной угловой скоростью . Ось вращения перпендикулярна стержню, проходит через его конец и параллельна силовым линиям магнитного поля (рис.). Найдите разность потенциалов , возникающую между концами стержня.
Схемотехника-электроника
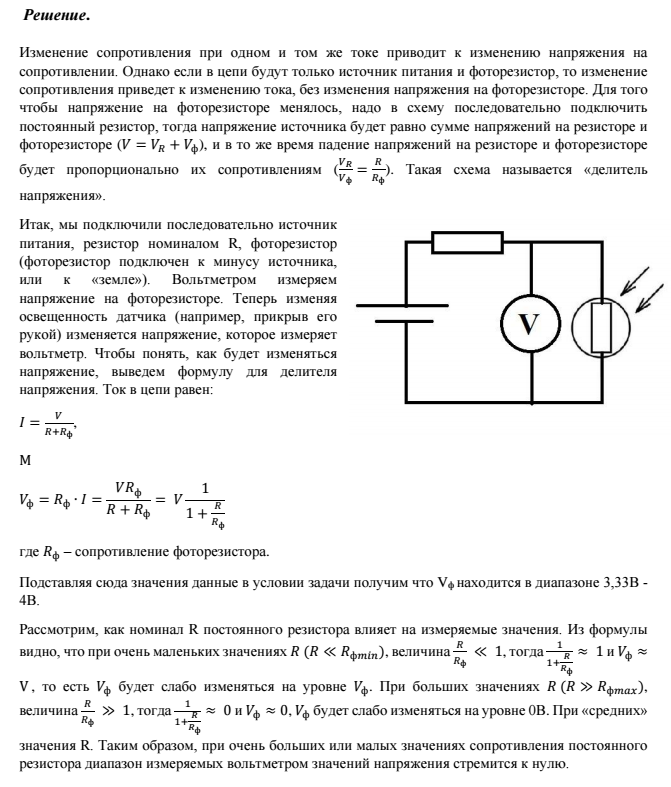
Необходимо с помощью вольтметра отслеживать освещенность, используя фоторезистор. Сопротивление фоторезистора уменьшается при увеличении количества падающего на него света. Вольтметр может измерять напряжение между выбранной точкой и «землей», при этом ток вольтметра пренебрежимо мал.
Используя источник питания, фоторезистор, постоянный резистор, вольтметр, нарисуйте электрическую схему для отслеживания изменения освещенности?
В каком диапазоне будет изменяться напряжение на вольтметре, если номинал постоянного резистора , а сопротивления фоторезистора изменяется в диапазоне ?
Что произойдет с диапазоном измеряемых вольтметром значений напряжения, если постоянное сопротивление взять очень большим или маленьким?
Междисциплинарные предметы
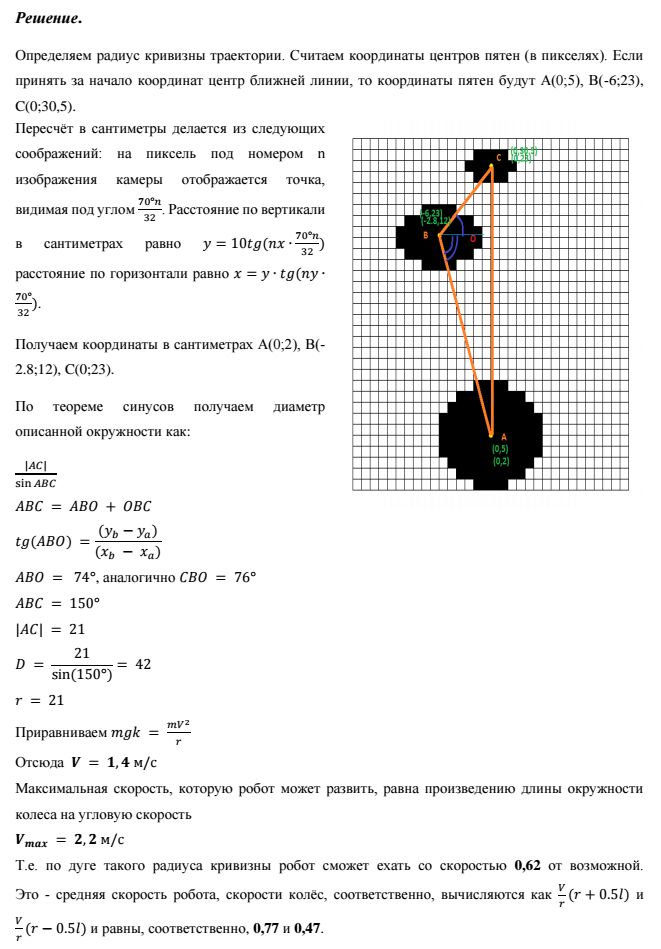
Робот с дифференциальным управлением (два моторчика, управление происходит за счёт разности скоростей моторчиков) следует по чёрной прерывистой (состоящей из круглых пятен) линии на белом фоне с использованием камеры. Камера позволяет получить чёрно-белое изображение в разрешении точки:
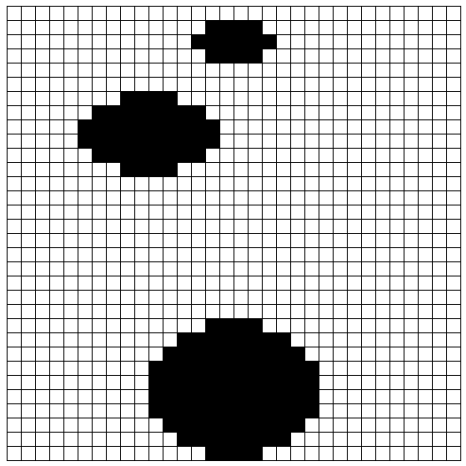
Максимальная скорость моторчиков оборотов в минуту, диаметр колёс - . Коэффициент трения колёс о полигон равен . Считая кривизну траектории постоянной на участке, попавшем в камеру, оценить максимальную скорость (относительно максимальной скорости моторов), с которой робот может следовать по линии на этом участке.Какова при этом разность скоростей правого и левого колеса? Высота камеры над полом , угол зрения камеры градусов, камера наклонена так, что ближний край поля зрения находится как раз под камерой. Расстояние между колёсами робота .